حضور احمد رضا زبردست دانش پژوه گروه در اولین جشنواره علمی کودک و نوجوانان گیلان با ارائه پروژه ربات "دست نوازنده"

حضور احمد رضا زبردست دانش پژوه گروه در اولین جشنواره علمی کودک و نوجوانان گیلان با ارائه پروژه ربات "دست نوازنده"
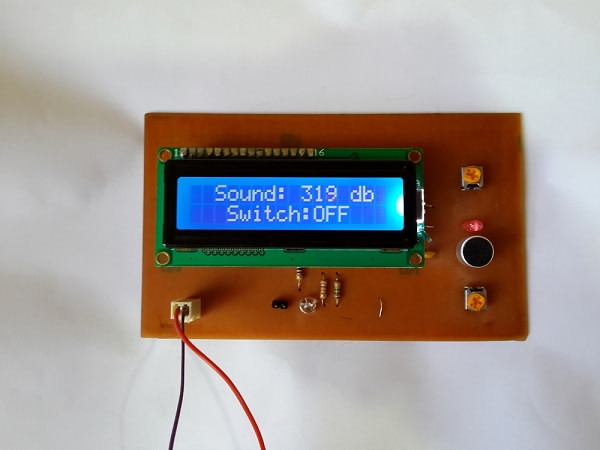
این پروژه از atmega8 و LCD2*16 تشکیل شده و با زبان بسکام نوشته شده است ،با استفاده از این پروژه شدت صوت اطراف از طریق یک میکروفن خازنی تقویت شده و سپس روی یک نمایشگر 2*16 نمایش داده می شود . همچنین دارای یک کلید صوتی است که با استفاده از سوت کار می کند در صورتی که به مدت بیشتر از 400 میلی ثانیه سوت زده شود یک ال ای دی روشن میشود و در صورتی که مجددا به مدت بیش از 400 ثانیه سوت زده شود ال ای دی خاموش می شود ، در کنار ال ای دی یک خروجی قرار داده که میتوان آن را به وسایل جانبی مانند رله وصل کرد ، این مدار میتواند کاربر های زیادی داشته باشد مثلا از آن برای روشن و خاموش کردن چراغ های اتاق خواب با استفاده از سوت استفاده کرد همچنین دانشجو ها میتوانند از آن برای پروژه پایان ترم استفاده کنند .
در فایل ضمیمه شده موارد زیر وجود دارند:
روبوکاپ در ایران
در ایران نیز هر سال تعداد زیادی مسابقات روباتیک با عنوان ها و رشته های مختلف برگزار می شود. در این میان سهم مسابقات دانش آموزی در آن بسیار بیشتر از دانشجویی است. البته معتبرترین و شاخص ترین مسابقات روباتیک در حال حاضر در ایران عبارتند از:
مسابقات آزاد ایران اپن (Iran Open): این مسابقات که در واقع محلی برای آماده سازی روبات ها برای مسابقات روبوکاپ است، در کشورهای مختلفی از جمله: ایران، آلمان، ژاپن، امریکا، استرالیا و پرتغال برگزار می شود. در ایران با این که از سال 2006 شروع به کار کرد، از هر نظر در مقایسه با کشورهای دیگر، در بین بهترین مسابقات از نظر سطح برگزاری، پوشش رشته های مختلف، تعداد تیم های شرکت کننده و تعداد تیم های خارجی شرکت کننده قرار دارد. بنابر این مسابقات ایران اپن دارای اعتبار بالایی در سطح جهانی است. در قسمت دانش آموزی به قدری مسابقات سنگین و رقابت ها نزدیک و دشوار است که تیم های برتر دانش آموزی که به مسابقات جهانی اعزام می شوند، همیشه دست پر از این مسابقات باز می گردند.
مسابقات روباتیک خوارزمی: این مسابقات که هر ساله توسط وزارت علوم و تحقیقات و وزارت آموزش و پرورش برگزار می شود، از نظر اعتبار دارای بالاترین اعتبار در کشور است تا این حد که برگزیدگان رشته های مختلف از تسهیلات ویژه ای برای ادامه تحصیل برخوردار می شوند. در این مسابقات سعی می شود علاوه بر در نظر گرفتن نتیجه ی مسابقه، سطح علمی اعضای تیم های شرکت کننده نیز سنجیده شود. به همین منظور تاکید ویژه ای روی برگزاری مساحبه ی شفاهی و مستند سازی علمی شرکت کنندگان دارد.
روبوکاپ (RoboCup) عنوان مسابقاتی بینالمللی در زمینه دانش روباتیک و هوش مصنوعی است که بصورت سالیانه توسط فدراسیون بینالمللی RoboCup برگزار میشود. از آنجا که نام RoboCup برگرفته از کلمات«Robot Soccer» (مسابقه فوتبال) و «World Cup» (جام جهانی) است، هدف نمادین ربوکاپ پیروزی تیم فوتبال روباتهای انسان نما در سال ۲۰۵۰ )میلادی) در رقابت با برترین تیم فوتبال همان سال است ولی هدف آن به طور کل توسعه دانش روباتیک و هوش مصنوعی است.
تاریخچه روبوکاپ:
ایده برگزاری ربوکاپ برای اولین بار در سال ۱۹۹۲ توسط پروفسور آلن مک ورث از دانشگاه British Columbia کانادا در مقالهای تحت عنوان روباتهای بینا مطرح شد که این مقاله در سال ۱۹۹۳ در کتابی تحت عنوان «Computer Vision: System, Theory, and Applications» منتشر گردید. در همین زمان گروهی از محققان کشور ژاپن به بررسی امکانپذیری برگزاری مسابقه فوتبال روباتها پرداختند که این بررسیها منجر به تأسیس رقابتهای Robot J-League (که بعد به RoboCup تفییر نام داد) توسط پروفسور مینورو آسادا، یاسو کنیوشی و هیرواکی کیتانو شد. رقابتهای روبوکاپ در سال ۱۹۹۶ بصورت رسمی آغاز بکار کرد. مسابقات از آن سال به صورت دائم برگزار شد. ۲۰۱۰ سنگاپور، ۲۰۰۹ گراز – اتریش، ۲۰۰۸ سوژو - چین، ۲۰۰۷ آتلانتا (جورجیاتک) - آمریکا، ۲۰۰۶ برِمِن آلمان، ۲۰۰۵ اوزاکا - ژاپن ، ۲۰۰۴ لیسبون - پرتقال ، ۲۰۰۳ پادوا - ایتالیا، ۲۰۰۲ فوکوکا - ژاپن و بوسان - کره، ۲۰۰۱ سیاتل - آمریکا، ۲۰۰۰ ملبورن - استرالیا، ۱۹۹۹ استوکهلم - سوئد، ۱۹۹۸ پاریس - فرانسه و ۱۹۹۷ ناگویا - ژاپن (اولین دوره رسمی). در این مسابقات هر ساله تیم های ایرانی حضور فعالی داشته اند و در هر دو بخش دانش آموزی و دانش جویی رتبه های خوبی کسب کرده اند. تقریبا از سال 2006 ایران در بخش دانش آموزی حد اقل یک مقام اولی داشته و در رشته های مختلف آن و در سال های قبل نیز تیم هایی در رده های اول تا سوم از ایران بوده اند. البته در قسمت دانشجویی نیز برخی از دانشگاه های ایران بسیار در این زمینه فعال عمل می کنند.
رشته های روبوکاپ:
رقابت های فوتبال (Soccer)
لیگ ربات های اندازه کوچک (Small Size)
لیگ ربات های اندازه متوسط (Middle Size)
لیگ ربات های استاندارد (Standard Platform)
لیگ ربات های انسان نما (Humanoid)
لیگ شبیه سازی (Soccer Simulation)
شبیه سازی دو بعدی فوتبال (2D Soccer Simulation)
شبیه سازی سه بعدی فوتبال (3D Soccer Simulation)
واقعیت ترکیبی (Mixed Reality)
رقابت های امداد و نجات (Rescue)
لیگ ربات های امدادگر (Rescue Robot)
لیگ شبیه سازی امداد و نجات (Rescue Simulation)
لیگ ربات های خانگی (@Home)
مسابقات نوجوانان (زیر ۱۸ سال( (Junior)
رقابتهای فوتبال نوجوانان (Soccer)
رقابتهای رقص نوجوانان (Dance)
رقابتهای امداد و نجات نوجوانان (Rescue)
رقابت عمومی نوجوانان (General)

“Scout” یک قایق خودکار با ۴ متر طول میباشد که توسط گروهی از جوانان مستقل ساخته شده است و تلاش میکند که عرض اقیانوس اطلس را بپیماید. این ربات، سفر خود را از جزیره ی رود آیلند در ۲۴ آگوست آغاز کرده و اگر همه چیز خوب پیش برود، قرار است در یک مدت چند ماهه، به مقصد خود، یعنی اسپانیا برسد.
اسکات در حال حاضر حدود ۱۶۰۰ کیلومتر (۱۰۰۰ مایل) از مسیر ۵۹۰۰ کیلومتری (۳۷۰۰ مایلی) خود را پشت سر گذاشته است و اگر این سفر دریایی را با موفقیت به اتمام برساند، احتمالا در آینده به کتابهای تاریخ تعلق خواهد داشت.
عبارت “احتمالا” را برای این قایق بکار برده ایم زیرا اولین باری نیست که یک شناور رباتیک از اقیانوس اطلس می گذرد : Scarlet Knight (اسکارلت نایت) نیز یک ربات دریارو بود که توسط محققان دانشگاه راتگرز در سال ۲۰۰۹ بکار گرفته شد. اما به نظر میرسد که اسکات به چند دلیل، برتر از اسکارت می باشد.
همانطور که می بینید، اسکات ، اولین ربات شناور سطحی برای عبور از اقیانوس خواهد بود. اما اسکارلت به عنوان یک گلایدر اقیانوس شناسی شناخته میشد که همانند شنای دلفین ها، به بالا و زیر سطح آب میرفت و اکثر زمان سفر خود را در عمق اقیانوس سپری کرد.
خوب، شاید تمایز میان یک شناور سطحی و گلایدر اقیانوس شناسی از نظر افراد دریا ندیده، بسیار ظریف بوده و اهمیت چندانی نداشته باشد، اما دلایل دیگری نیز برای خارج کردن اسکارلت از کتاب رکورد عبورکننده های خودکار از اقیانوس اطلس وجود دارد. برای مثال، اسکارلت به وسیله ی یک کشتی در فاصله ی ۵۰ مایل دریایی از ساحل نیوجرسی راه اندازی شد و این ربات در فاصله ی دریایی بمراتب دورتر از اسپانیا، توسط کشتی دیگری بازیابی گشت. بنابراین آن در واقع هرگز یک سفر دریایی قاره به قاره را انجام نداده است.
اگر این دلیل را نکتهای جزئی و بیاهمیت تلقی کنید، احتمالا شما تاکنون سفری دریایی در دریاهای آزاد نداشته اید. در وسط اقیانوس، تقریبا چیزی زیادی برای برخورد وجود ندارد اما در نزدیکی ساحل، شما در خطوط کشتیرانی قرار دارید و قایق های ماهی گیری در اطراف آن به صورت مارپیچ حرکت میکنند و تورهای ماهی گیری را پهن کرده یا آن ها را به ساحل حمل میکنند و همچنین ترافیک تفریحگاه های ساحلی نیز به طور فوقالعادهای افزایش می یابد. اگر شما در چنین مکان شلوغی قایقرانی کنید، میشود حدس زد که مجبور به جا خالی دادن برای عدم برخورد با دیگر قایق ها خواهید بود. بنابراین این حقیقت که اسکارلت مجبور به تحمل مخاطره آمیزترین بخش از سفر در اقیانوس اطلس نبود، نکتهای قابل ملاحظه می باشد.
همچنین در نظر داشته باشید که اسکارلت می توانست از راه دور کنترل شود. در واقع تنها پس از گذشت زمان کمی از قرار دادن اسکارلت درون دریا، مشخص شد که مشکلی برای آن پیش آمده است و این مشکل به وسیله ی ارسال رادیویی برخی پارامترهای جدید، برطرف گردید. حالا چطور میتوان گفت که این یک ربات کاملا مستقل بوده است؟
بعلاوه، اسکارلت نیاز به یک توقف برای برخی بازبینی ها داشت. با خاموش شدن در ساحل مجمع الجزایر آزورس، تکنسین هایی از دانشگاه راتگرز، اسکارلت را گرفته و زوائد دریایی چسبیده به بدنه ی آن را پاک کردند. آنها به جای آوردن اسکارلت به روی کشتی، این کار را درون آب انجام دادند. بنابراین از نظر فنی، سفر این گلایدر بیوقفه بوده است.
اما اسکات، برای ثبت رکورد خود، تحت مجموعهای متفاوت از قواعد راه اندازی شده است. این ربات با موفقیت از ساحل عبور کرده و درون آب، با داشتن دو ریسمان مهار کننده، زیر خود را تمیز می کند. اسکات، بروز رسانی های تله متری (مسافت سنجی) خود را سه مرتبه در هر ساعت، با استفاده از یک فرستنده ی ایریدیوم ارسال می کند، اما هیچ دستور جدید یا پارامتری نمیتواند به آن فرستاده شود و این ربات باید به طور مستقل حرکت کند.

عملیات کاملا مستقل به معنی برخی مشکلات مزاحم خواهد بود. تیم اسکات نیز متوجه شد که قایق آنها کمی پس از شروع حرکت، مشکلی داشته است –یک اشتباه کوچک نرم افزاری که باعث شد تا این ربات، بسیاری از ایستگاه های دریایی برنامهریزی شده را نادیده بگیرد (این اشکال، در کد در نظر گرفته شده برای جلوگیری از گم شدن قایق در پیشروی به سوی ایستگاه های شرقی بوده است). اما اسکات از این مشکل رهایی یافته و همچنان در حال حرکت به سمت اسپانیا میباشد. این تیم بسیار مطمئن است که اسکات به سمت ایستگاهی که در فاصله ی ۱۵۰ مایلی غرب مقصد نهایی اش، یعنی شهر Sanlúcar de Barrameda قرار گرفته، حرکت می کند.
اگرچه ساختار بدنه ی اسکات تا حدودی از تکنولوژی خوبی بهره میبرد – فوم فیبر کربن فشرده Divinycell – بقیه ی قسمت های این قایق نسبتا ساده ایجاد شده است. پنل های خورشیدی متصل شده بر بالای بدنه، یک باتری لیتیوم-آهن-فسفات را شارژ میکنند که به نوبه ی خود، قدرت لازم برای یک موتور چرخنده ی معمولی متصل به زیر بدنه ی قایق را تامین می نماید. تحت شرایط ایده آل، باتری اسکات مقدار شارژ کافی را در طول روز کسب خواهد کرد تا موتور قایق بتواند در سراسر شب کار کند. تحت شرایط غیر ایدهآل نیز در مواقع پایین آمدن ولتاژ باتری، موتور خاموش میشود و قایق بر روی آب معلق میماند تا زمانی که باتری دوباره شارژ گردد.
اسکات تا حد زیادی قابلیت دریانوردی دارد حتی زمانی که هیچ قدرتی نداشته باشد بنابراین معلق ماندن بر روی امواج دریا، آن هم برای چند روز، چیزی مهمی نخواهد بود. حتی طوفان های شدید نیز نباید مسئله بزرگی باشند: عرشه فوقانی زاویه دار بوده و مقدار سنگینی از سرب قرار گرفته در زیر کف قایق، این اطمینان را ایجاد خواهد کرد که اگر این قایق منحرف یا واژگون شود، به سرعت میتواند حالت خود را اصلاح کند.
ساختار اسکات همچنین دارای دو ویژگی محافظت در برابر خرابی نیز می باشد. مورد اول، کامپیوتر آنبوردی است (یک آئوردینو) که به صورت اتوماتیک، هر چند ساعت یکبار ریست میشود. این کامپیوتر لازم است تا از قایق در برابر بی حرکت ماندن و مسدود شدن در مواقع نشت حافظه یا بزور دیگر مشکلات ظریف در کد آن، محافظت کند.
دیگر سنجش هوشمندانه ای که تیم سازنده به کار گرفته اند، برای برنامهریزی قایق به منظور توقف و بک آپ گیری از مسیرهای کوتاهی است که در هر ۵ ساعت طی می کند. تصور تیم اسکات این است که این مانور همچنین میتواند به پاک کردن کف قایق و موتور از هر چیز شناوری که ممکن است به آنها بچسبد، کمک کند. آنها میگویند که این روش را تست کردهاند و نتیجه گرفته اند که به خوبی کار می کند.
تخمین زده میشود که بزرگترین چالش اسکات، برخورد با زباله های دریایی می باشد، بخصوص منحرف شدن با تکه پاره های خطوط ماهیگیری که میتواند به راحتی باعث خرابی قایق شود. همچنین خزه های دریایی و جلبک های شناور معمولی نیز میتوانند باعث ایجاد مشکلاتی بشوند. به هر حال، اینکه اسکات بیشتر از یک چهارم مسیر کلی خود را پشت سر گذاشته است، امیدوارکننده خواهد بود.

گروهی از موسسهی سیستم و رباتیک در دانشگاه Coimbra پرتغال به توسعهی یک ربات مینروب به منظور کمک به اجرای وظیفهی خطیر پاکسازی میلیونها مین زمینی فعال در سراسر جهان، اقدام نمودند. در حال حاضر که این ربات تحت تستهای جدی قرار دارد، گروه سازنده بر روی بهینهسازی آن جهت اجرای خودکار از حالت دستی در فعالیت بسیار خطرناک مینزدایی، در حال کار میباشند.

این پروژه از سال ۲۰۱۲ به عنوان بخشی از برنامهی Partnerbot Grant که از پیشرفت تحقیقات رباتیک پشتیبانی میکرد، آغاز بکار کرد و توسط یک مجموعهی رباتیک کانادایی، پایهی رباتیکی با نام وسیلهی زمینی بدون سرنشین قدرتمند ایجاد شد.
پس از دریافت پایهی ربات، تیم تحقیقاتی آن را با سنسورهای ناوبری و موقعیتیابی سازگار کرده و برای آن یک رادار نفوذ زمینی و یک بازوی رباتیک سفارشی با فلزیاب متصل شده بدان، ایجاد نمود. این قطعات موجب اجرای سه وظیفهی کلیدی توسط این ربات میشود: درک مشخصات زمینی،حرکت در سراسر زمین و تشخیص و مکانیابی مینهای زمینی.

اولین مرحلهی آزمایشات میدانی بر روی این ربات در سال ۲۰۱۳ با تجهیز به یک بازوی رباتیک سفارشی، موفق به اجرای برخی وظایف پیچیده شد. این گروه هماکنون در حال ایجاد تنظیمات بر روی این دستگاه با در نظر گرفتن تستهای بیشتر در اواسط سال ۲۰۱۴ می باشند.
لینو مارکز (Lino Marques)، سخنران ارشد دانشگاه کویمبرا و رابط علمی این پروژه میگوید: “مینروبی یک فرایند فوقالعاده خطرناک و زمانبر است. رباتها خسته نمیشوند، قادر به اجرای کامل وظیفهی خود هستند، و هزینهی مصرفی آنها کمتر از زندگی یک انسان میباشد. به همین دلایل، رباتها بهترین راهحل برای مشکل مینروبی به شمار میروند.”
اگر دیدگاه این گروه به طور کامل پیادهسازی شود، دستگاه کویمبرا به سایر رباتهای مینروب مانند MineWolf و DIGGER DTR D-3 افزوده خواهد شد. طبق اعلام یونیسف هنوز ۱۱۰ میلیون زمین شامل مین در سراسر جهان وجود داشته و ماهانه زندگی ۸۰۰ نفر به این دلیل نابود میشود، از این رو هر گونه پیشرفتی در جهت کاهش این تلفات قابل ستایش است.

“شاتل فضایی” ممکن است از بین رفته باشد، اما بخشی از آن هنوز هم محکم و استوار به کار خود ادامه می دهد. بازوی رباتیکی Canadarm کانادایی برای اولین بار بر روی شاتل در سال ۱۹۸۱ نصب شد و جانشین آن، Canadarm2 ، هنوز هم در ایستگاه فضایی بین المللی (ISS) در حال کار است و در انجام آزمایشات، حمایت از فضانوردان در پیاده روی فضایی و کمک به هدایت کشتی های باری بدون سرنشین فعالیت می کند. آژانس فضایی کانادا (CSA) اکنون بر روی نسل بعدی کانادارم (یا به اختصار NGC) در حال کار است که از مدل گذشته خود انعطاف پذیرتر و فشرده تر بوده و این نسل، بخشی از یک سیستم ۵ بخشه ی جدید است که برای برطرف کردن نیاز به بازوهای رباتیک، جهت کمک به تعمیر ماهواره ای و سوخت گیری طراحی شده است.

پروژه NGC تنها به ارتقای تکنولوژی بازوی رباتیک نمی پردازد، بلکه در حال گسترش آن به شکل یک سیستم جدید می باشد و هدفش تنها بهبود یک بازوی ربات نیست بلکه به دنبال توسعه یک شیوه از تکنیک های پیشرفته برای سازگاری با این رویکرد، باراندازی، خدمت رسانی در فضاپیماها برای تعمیر و نگهداری و همچنین سوخت گیری می باشد. به عنوان بخشی از این سیستم، پروژه NGC بر روی پنج بخش کار می کند.
Canadarm بزرگ نسل بعدی
“کانادارم بزرگ نسل بعدی” (تصویر زیر) که توسط مک دونالد، دِت ویلر و اسوشیتس LTE ساخته شده، یک نسخه جمع و جورو فشرده تر از Canadarm2 می باشد. مانند کانادارم۲، این مدل نیز دارای طول ۱۵ متر است و بزرگترین بخش از میان اجزای پنج گانه این پروژه می باشد. با شش درجه آزادی و سخت افزار و نرم افزارهای پیشرفته، قادر به مدیریت اتصال به فضاپیماهای بزرگ و عملیات سوخت گیری است اما این مدل همچنین از بخش های تلسکوپی و جمع شدنی ساخته شده بنابراین می تواند به کمتر از ۵ مترمکعب جمع شود و با توجه به این ویژگی قادر به سازگاری با فضاپیماهای کوچک تر نیز می باشد.

Canadarm کوچک نسل بعدی
این یک بازوی کوچک تر ۲.۵ متری است که مبتنی بر بازوی Dextre می باشد و همچنین در ایستگاه فضایی بین المللی ISS بکار می رود و می تواند به طور مستقل و یا به عنوان یک بخش الحاقی به کانادارم۲ عمل کند. این مدل برای شرکت در تعمیرات ماهواره ای با استفاده از مجموعه ای از ابزارهای تخصصی در نظر گرفته شده است. با استفاده از این مدل می توان به تعویض اجزا، حذف روکش های محافظ، بریدن سیم ها و باز و بسته نمودن دریچه ها به صورت خودکار و یا تحت کنترل از راه دور پرداخت.

عملیات بستر آزمایشی سیستم مجاورتی
بخش سوم سیستم، عملیات بستر آزمایشی سیستم مجاورتی است. این امر با استفاده از دو سیستم رباتیک صنعتی اجرا می شود که حرکات دو فضاپیمای بارانداز را شبیه سازی می کنند تا آن ها مانورهای خود را انجام داده و همچنین به ارائه روشنایی واقعی و بینایی دوربینی برای کمک به آزمون های شبیه سازی می پردازد.

سیستم الحاق نیمه مستقل
این بخش برای آزمایش روش اتصال دو فضاپیما به هم طراحی شده است. اتصال فضاپیماها برای نیم قرن است که انجام شده اما تماس برقرار کردن بین دو فضاپیمای مشترک یک نکته است و ایجاد این تماس هنگامی که یکی از آن ها نیاز به تعمیر دارد چیز دیگری می باشد، بنابراین هنوز جای پیشرفت زیادی وجود دارد. بر خلاف عملیات بستر آزمایشی سیستم مجاورتی، این سیستم برای تمرین خود-اتصالی واقعی استفاده می شود. ایده ی این قسمت، این است که با استفاده از بازوهای رباتیکی کنترل از راه دور، تحت اجرای یک عملیات کاملا خودکار، اتصال های پیشرفته انجام شود.

ایستگاه عملیات ماموریت
چهار مولفه پیشین با ایستگاه عملیات ماموریت NGC هماهنگ هستند. بر اساس CSA، ایستگاه عملیات ماموریت (MOS) به عنوان یک کنترل کننده کوچک ماموریت ها عمل می کند و قادر به مدیریت هر چهار بخش دیگر چه سخت افزاری و چه در شبیه سازی می باشد.
