کواد کوپتر که چندسالی هست خیلی از ربات سازان را به طرف خود کشیده است یک نوع ربات پرنده که با چهار موتور و چهار پروانه ثابت روی آن ساخته می شود . که هر جفت موتور در خلاف جهت هم حرکت می کنند و معمولا برد کنترل کننده و درایور موتور روی آن موجود می باشد که جهت حرکت موتور ها و سرعت آن ها را تنظیم می کند . در ادامه با ما باشید تا مروری داشته باشیم بر ساخت این ربات پرنده.
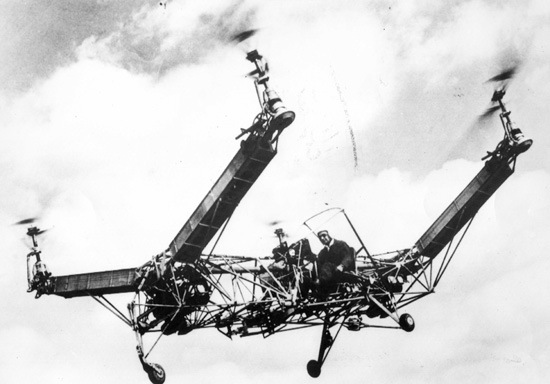
کوادکوپتر با سرنشین 1957
ساخت کوادکوپتر امروزه بین علاقمندان به ربات ،دانشجویان و حتی دانش آموزان خیلی محبوبیت پیدا کرده است و هر سال چندید مسابقه داخل کشوری و بین المللی برگذار می گردد . البته استفاده های خیلی زیادی هم در صنایع مختلف از جمله نظامی ، فیلم برداری ، عکاسی ، امداد و... دارد که محبوبیت این روبات را دوچندان کرده است این ربات بر خلاف ظاهر آن که خیلی ساده به نظر می رسد پیچیده هستش و کنترل آن و ساخت این ربات دقت زیادی را می طلبد.

- کوادکوپتر با دوربین

- کوادکوپتر

- کوادکوپتر با دوربین

- کوادکوپتر با دوربین

- کوادکوپتر بزرگ

- کوادکوپتر با دوربین
همانطور که از شکل های بالا می بینید یک نمونه از کاربرد های کوادکوپتر عکاسی و فیلمبردای هستش که از ارتفاعات مختلف و از زاویه های مختلف می تواند فیلم برداری کند و با این روش خیلی راحت می توان از ارتفاع چند متری از زمین فیلم بردی کرد و همچنین در جاهایی که انسان دسترسی ندارد این ربات به آسانی می تواند از آن مکان ها فیلم برداری کند…خلاصه این ربات کاربرد های زیادی می تواند داشته باشد که با این روند پیشرفت در آینده شاهد آنها خواهیم بود.

کوادکوپتر ساده
خب بریم سر اصل مطلب یعنی ساخت آن ، کوادکوپتر ها در شکل های مختلفی ساخته می شوند بعضی ها با فیبرهای نازک و سبک بدنه آن را می سازند بعضی ها با پرینترهای سه بعدی برای خود بدنه کوادکوپتر طراحی می کنند و البته بعضی ها ترجیح می دهند از بدنه های آماده استفاده کنند . در مورد موتورهای این روبات ها می توان گفت که از موتورهای براشلس سرعت بالا استفاده می شود که نیاز به درایورهای خاص خوشان را دارند که در بازار بصورت آماده موجود می باشند و یا اگر شخص سازنده الکترونیکی باشد می تواند خودش نسبت به نوع موتورش برای خودش طراحی کند که مطمئنا بهتر از مدل آماده خواهد شد . یکی از مهمترین قسمت های این روبات باطری این روبات می باشد که باید سبک ولی زیاد شارژ نگه دارد که از باطری های مختلفی نسبت به نوع روبات استفاده می شود .یکی دیگر از قطعات خیلی مهم که در کوادکوپتر استفاده می شود فرستده و گیرنده می باشد . که امروزه چون تصویر را هم انتقال می دهند از فرستنده گیرنده های سرعت بالا و در فرکانس های 2.4 گیگاهرتزی و … استفاده می شود که البته می توان از هر نوع فرستنده مناسب استفاده کرد…حالا اگر از جزئیات قطعات و ساختش بگذریم که بحث های خاص خودش را دارد به معرفی کلی ساختار آن می پردازیم که در شکل نحوه چرخش موتور ها نشان داده شده است . در ادامه با ما باشید تا بیشتر با نحوه ساخت یک نمونه ساده آشنا شویم…
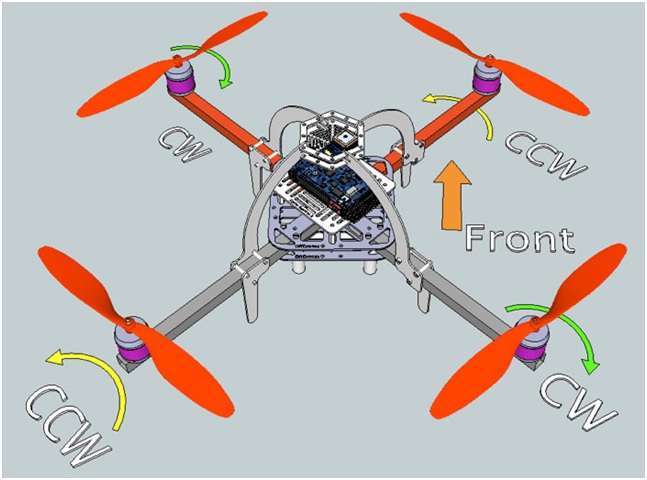
نحوه چرخش موتورهای کوادکوپتر برای بالا رفتن
در شکل های زیر می توانید نمونه هایی از کوادکوپتر ها را مشاهده کنید :

- کوادکوپتر

- کوادکوپتر

- کوادکوپتر با دوربین

- کوادکوپتر با دوربین

- کوادکوپتر با دوربین

- کوادکوپتر با دوربین

- کوادکوپتر با دوربین

- کوادکوپتر با دوربین
- کوادکوپتر با دوربین

- کنترل حرفه ای کوادکوپتر

- کوادکوپتر با دوربین

- روبات پرنده 6 موتوره
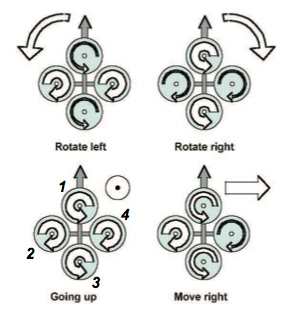
خب کوادروتر یا همان کوادکوپتر چگونه در جهت های مختلف حرکت می کند و چگونه بالا و پایین می رود?! برای انجام این حرکات روبات با خاموش کردن یکی از موتور ها یا جفت آنها و بعضی وقت ها با کم کردن سرعت آن ها انجام می دهد. در شکل زیر این حرکات نشان داده شده اند :
حرکت بشکل N , H

- حرکت به شکل H

- حرکت به شکل N
دانلود فایل آموزش ساخت کوادکوپتر
پسورد: microdesigner.ir





