چه خوشتان بیاید چه نه باید به شما ارباب های ربات های آینده خوش آمد گفت ! ماشین های عجیب و غریبی که در حال حاضر در بین جوامع انسانی می چرخند و کار خود را انجام می دهند . از یک مار رباتیک بگیرید که می تواند بخزد یا شنا کند تا یک ترانسفورماتور غول پیکر که شبیه به یک مسلسل جنگی است و برای تسلیحات نظامی کار می کند . در این جا با تعدادی از عجیب ترین ربات هایی که تا به حال ساخته شده اند آشنا می شویم .
Octavia
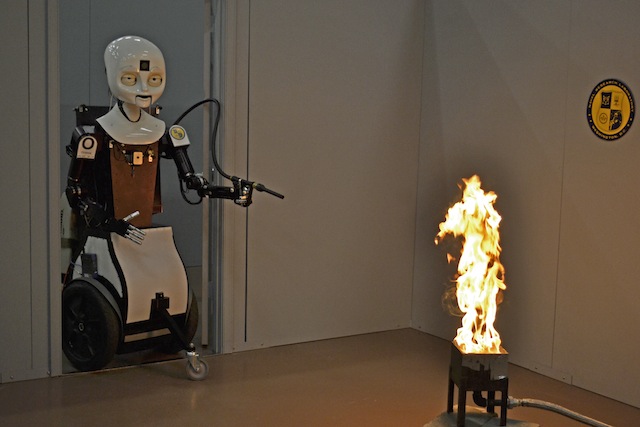 ربات آزمایشگاه تحقیقات نیروی دریایی امریکا ، یک ماشین انسان نما با شاید کمی از ویژگی های ظاهری خزندگان . اکتاویا یک ربات آتش نشان است که برای کمک به مهندسان به منظور تست تکنولوژی های جدید طراحی شده است تا دستیار نیروهای ناوگان دریایی ایالات متحده باشد .
ربات آزمایشگاه تحقیقات نیروی دریایی امریکا ، یک ماشین انسان نما با شاید کمی از ویژگی های ظاهری خزندگان . اکتاویا یک ربات آتش نشان است که برای کمک به مهندسان به منظور تست تکنولوژی های جدید طراحی شده است تا دستیار نیروهای ناوگان دریایی ایالات متحده باشد .
اکتاویا طراحی شده تا با انسان در تعامل باشد و مهندسان تلاش می کنند تا راه هایی پیدا کنند که ربات انسان ها را تشخیص داده و دنبال کند ، بفهمد آن ها چه می گویند و حرکاتشان را تشخیص دهد . سرانجام دانشمندان امیدوارند اکتاویا بتواند شانه به شانه انسان ها به عنوان یک هم تیمی کار کند البته با قابلیت های تشخیص بصری و گفتاری پیچیده !
ربات آنفلوانزای h1n1

این ربات با تصویری که معمولا از یک ربات در ذهن ما نقش می بندد کمی متفاوت است . در واقع یک تدبیر جالب برای شبیه سازی بیماری آنفلوانزای خوکی (h1n1) برای کمک به پزشکان ژاپنی است . این ربات پوششی شبیه به پوست انسان دارد ، می تواند مثل انسان عرق کند ، گریه کند و حتی دچار تشنج شود . اگر ربات درمان مناسب را دریافت نکند به مرور بدتر و بدتر خواهد شد و در برخی موارد حتی تنفسش قطع شده و می میرد !
BigDog
سگ بزرگ : در سال 2005 میلادی ، در شرکت بوستون دینامیک یک ربات چهارپای غژ غژ کنان تولید شد که big-dog نام گرفت . این ربات به عنوان یک باربر در خدمت ارتش ساخته شد . بودجه این پروژه توسط دارپا (آژانس پروژه های تحقیقاتی پیشرفته دفاعی) تامین شد ، زیرمجموعه ای از وزارت دفاع ایالات متحده که وظیفه توسعه تکنولوژی های جدید رابرای ارتش به عهده دارد . big-dog می تواند روی چهار پای خود خیلی متعادل گام بردارد و به عنوان یک وسیله نقلیه زمخت سربازان را در همه جا همراهی کند . این ربات می تواند تا 150 کیلوگرم محموله را حمل کند و نیز سرعت خود را تا حداکثر 6.4 کیلومتر در ساعت حفظ کند .
 ربات Nao
ربات Nao
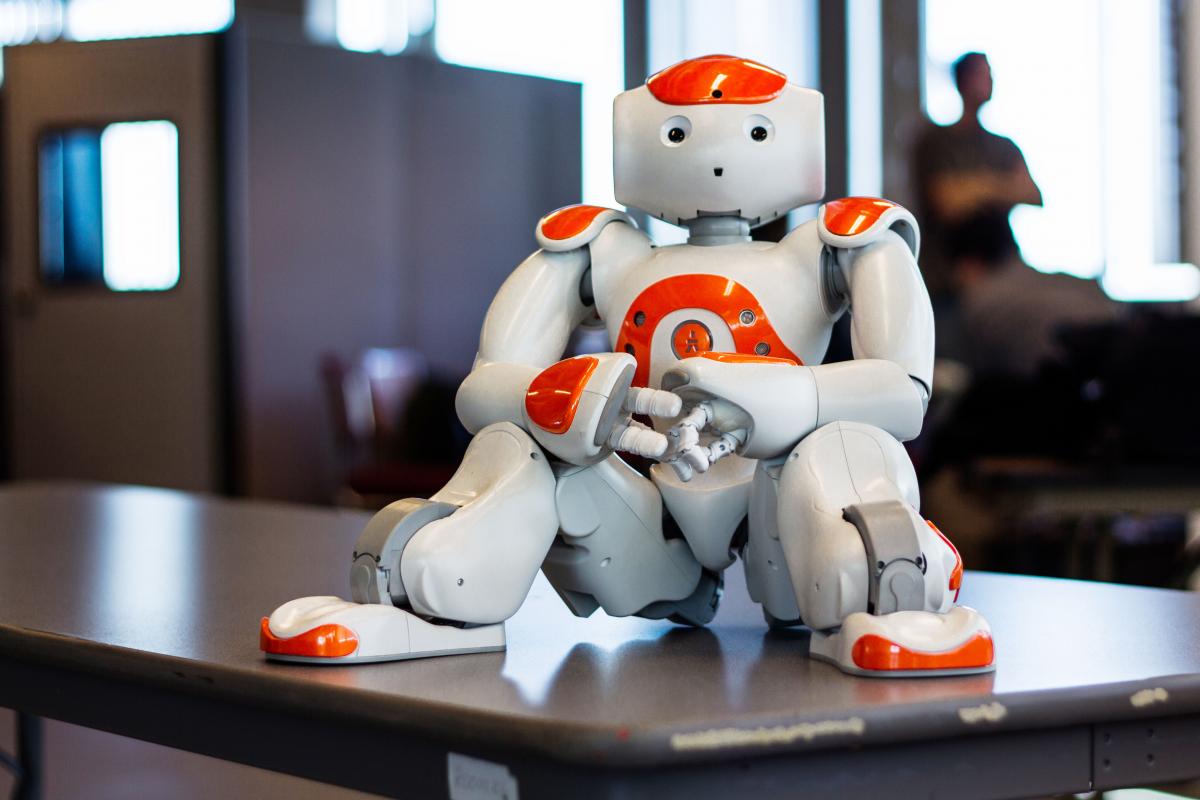
شرکت فرانسوی Aldebaran Robotics ، که مرکز آن در پاریس است ربات قابل برنامه ریزی و خودمختاری را به نام نائو گسترش داد . این ربات تعاملی به حرکت برش لبه ، بینایی و قابلیت های صوتی مجهز شده است .
Nao می تواند روی سطوح مختلف راه برود چهره ها و اشیاء را تشخیص داده و دنبال کند ، احساسات را بفهمد و نشان دهد و به لمس شدن و دستورهای صوتی واکنش نشان دهد و اگر این موارد کافی نیست ، او می تواند رقص سبک گانگ من را هم اجرا کند .
Kurata Robot
در دنیای رباتیک خیلی از اختراعات عجیب تر از یک افسانه هستند . ربات غول پیکر کوراتا به راحتی می تواند با ربات های فیلم های پرفروش هالیوودی مثل ترانسفورمر و ریل استیل اشتباه گرفته شود . ربات ژاپنی ، که توسط صنایع سنگین Suidobashi ساخته شده است . یک ربات سهمگین و ترسناک که با طول 4 متر ایستاده و یک مسلسل و موشک انداز را نیز در آغوش گرفته است . (در واقع همان تفنگ BB و وسایل آتش بازی که هنوز هم خطرناک هستند ) . این ربات می تواند توسط یک اتاقک کنترل داخل خود ربات و یا توسط گوشی های هوشمند همراه کنترل شود . آیا شما هم ربات کوراتای خودتان را می خواهید ؟ این ماشین سفارشی ساخته شده را می توانید با مبلغی معادل 1.35 ملیون دلار خریداری کنید .
 Snake-bot
Snake-bot
ربات مار : acm-r5 یک ربات خزنده است که می تواند روی خشکی بخزد و در آب شنا کند . این ربات دوزیست توسط شرکت ژاپنی hibot ساخته شده که بخش شگفت انگیز و جالب توجه آن پیچش و چرخش ماهرانه ربات زیر آب می باشد .







