
آموزش تصویری هدایت خودکار کوادروتور
عنوان |
زمان |
اسلاید |
ویدیو |
|
|---|---|---|---|---|
1 |
Wellcome |
|||
2 |
Why Quadrotors |
|||
3 |
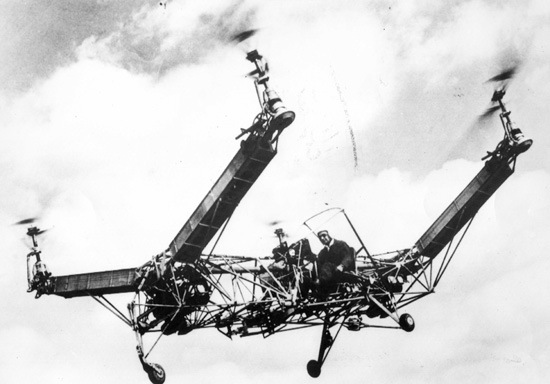
Flying Principle |
|||
4 |
Quadrotor Research |
|||
5 |
Linear Algebra |
|||
6 |
2D Geometry |
|||
7 |
2D robot Example |
|||
8 |
3D Geometry |
|||
9 |
Sensors |
|||
10 |
Motors and Controllers |
|||
11 |
Feedback control |
|||
12 |
Kinematic and Dynamic |
|||
13 |
PID Control |
|||
14 |
State Estimation |
|||
15 |
Recap on Probability Theory |
|||
16 |
Reasoning With Bayes Rule |
|||
17 |
Bayes Filter |
|||
18 |
Kalman Filter |
|||
19 |
Extended Kalman Filter |
|||
20 |
2D Motion Estimation |
|||
21 |
Visual Odometry |
|||
22 |
Visual navigation with Parrot |
|||
23 |
Tracking and Mappnig |
|||
24 |
Direct method For Visual Slam |
روبات ها یکی از موضوعات جذاب قرن ما محسوب می شوند که با پیشرفت تکنولوژی قدرت و هوش آن ها نیز افزایش می یابد . با پیشرفت مکانیک قدرت مونور مکانیکی و ظاهری روبات زیاد می شود و با پیشرفت الکترونیک دقت و کنترل روبات بهینه تر می شود . امروزه روبات ها در صنایع مختلف کاربرد پیدا کرده اند و هر روز بر محبوبیت آن ها اضافه می شود . در این پست عکس هایی از مراحل روبات 6 پا واستون گذاشتم شاید در ساخت روبات بهتون کمک کنن.





























منبع: innovelectronique.fr/2009/12/08/robot-hexapode-robot-fourmi





















هر ربات از 3 بخش اصلی تقسیم می شود:
مکانیک
الکترونیک
برنامه نویسی یا نرم افزار
مکانیک:
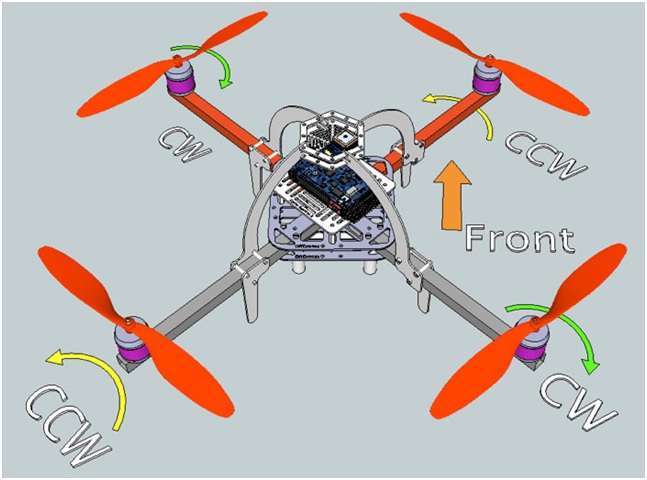
مکانیک کوادکوپتر ها به صورت ساده از 4 قسمت برای نصب موتورها و قسمتی برای نصب مدار الکترونیکی و قسمتی برای نصب باتری و قطعات دیگر مانند گیرنده و ... و قسمتی برای نصب دوربین که این قسمت معمولا به صورت مانت دوربین 2 محوره طراحی می گردد که از لرزش های حاصل از موتور ها و عوامل محیطی دیگر ، بر تصویر ضبط شده تاثیر نگزارد بیس اغلب فریم ها برای کوادکوپتر معمولا به صورت + می باشد و یا می توان به صورت چهار چوب به صورت # طراحی کرد بهترین گزینه برای ساخت بدنه کوادکوپتر استفاده از فیبرکربن میباشد که به دلیل موجودیت کم ، از آلومینیوم و یا چوب برای بیس و برای جایگاه نصب موتور و مدار و ... از پلکسی و یا فایبرگلاس (فیبر مدار چاپی) برای این منظور استفاده می شود جزء دیگر مکانیک کوادکوپتر ها ، ملخ می باشد که دارای 2 مشخصه گام و سایز است که نسب به موتور انتخاب می شود و با دریافت کردن دیتاشیت موتور می توانید ملخ های معرفی شده برای استفاده با موتور مورد نظر را مشاهده نمایید.
مدار الکترونیکی (فلایت کنترلر) که برای کنترل موتور ها و تنظیم سرعت آنها نسبت به داده های دریافتی از سنسور ها و گیرنده رادیوکنترلر و ماژول ها و غیره
سنسور ها و ماژول هایی که در فلایت کنترلر ها استفاده می شود مانند:
جایرو : برای اندازه گیری شتاب خطی می باشد
سنسور شتاب سنج : برای اندازه گیری شتاب زاویه ای می باشد
GPS
فرستنده گیرنده
بارو متر
میدان سنج مغناطیسی
فاصله سنج و...

لوازمی که برای ساخت یک کوادکوپتر کاملا ساده احتیاج است به شرح زیر است:
فریم یا بدنه کوادکوپتر:
فریم یا بدنه اسکلت ربات پرنده بوده که می تواند از جنس های مختلفی ساخته شده باشد. اکثر بدنه ها از آلومنیوم , پلاستیک سخت و فیبر کربن ساخته شده اند. بهترین و حرفه ای ترین بدنه های کوادکوپتر از جنس فیبر کربن بوده که نسبت به سایر مدل های بدنه از قیمت بالایی برخوردار است بدنه با فیبر کربن در عین استحکام بالا از وزن کمی برخوردار است , وزن و استحکام بدنه دو پارامتر بسیار مهم در انتخاب بدنه مولتی کوپتر هاست , بین دو نمومه دیگر بدنه کوادکوپتر یعنی آلومنیوم و پلاستیک سخت نوع آلومنیوم دارای وزن کمتری بوده اما بزرگترین عیب بدنه های آلومنیوم آن است که در صورتی که بدنه در اثر سقوط ضربه ببیند امکان کج شدن بازوها وجود دارد.عیب بدنه های پلاستیکی وزن بالا نسبت به آلومنیوم بوده اما بدنه های پلاستیکی دارای استحکام بیشتری نسبت به بدنه های آلومنیومی است.
جهت مشاهده انواع فریم و بدنه مولتی روتور به لینک زیر مراجعه نمایید:
www.modeliran.com/multicopter.php
موتور براشلس:
موتور براشلس یا موتور های بدون جاروبک یا بدون برس موتور هایی هستند با دور بسیار بالا در حدود 11 تا 18 هزار دور بر دقیقه که راه اندازی این موتور ها به سادگی موتور های dc معمولی نیست, موتور های براشلس اساسا دارای سه سیم هستند , موتور های براشلس را تا حدودی می توان به موتور های سه فاز تشبیه کرد چرا که برای راه اندازی به سه پالس برای راه اندازی احتیاج دارند. موتورهای براشلس مصرف انرژی بسیار بالایی دارند به گونه ای که یک مدل موتور براشلس که اندازه موتور سشوار است ممکن است به تنهایی 20 آمپر جریان کشی داشته باشد.
جهت مشاهده انواع موتور به لینک زیر مراجعه نمایید:
www.modeliran.com/motorbrand.php
اسپید کنترل:
راه اندازی موتور های براشلس به سادگی سایر موتور ها نبوده و پیچیدگی های خاص خود را دارد اما اسپید کنترل ها وظیفه راه اندازی موتور ها را داشته و عملا این پیچیدگی را از شانه ما بر می دارند. اسپید کنترل ها دارای سه دسته سیم هستند, دسته اول سیم های تغذیه که باید مستقیما به باتری وصل شوندو دسته دوم سیم های خروجی پالس که باید به سه سیم موتور براشلس متصل شوند.دسته سوم سیم های ورودی سیگنال هستند که به فلایت کنترل متصل می شوند.
جهت مشاهده انواع اسپید کنترل به لینک زیر مراجعه نمایید:
www.modeliran.com/speedbrand.php
فلایت کنترل:
همانگونه که از اسمش پیداست مداری است که وظیفه کنترل , تعادل و پایداری پرنده را بر عهده دارد. ساده ترین مدارهای فلایت کنترل عمدتا دارای ژیروسکوپ , شتاب سنج , بارومتر (فشار سنج) , قطب نما و ... هستند. در نمونه های پیشرفته تر فلایت کنترل ها ماژول های gps هم استفاده می شود.
جهت مشاهده انواع فلایت کنترلر به لینک زیر مراجعه نمایید:
www.modeliran.com/autopilot.php
ملخ:
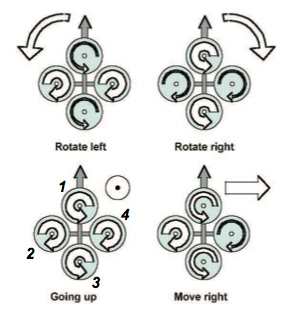
در هر پرنده ای چه سوختی چه مدل باتری احتیاج به ملخ هست , اما ملخ هایی که برای کوادکوپتر استفاده می شود باید مدل پولر پوشر یا اصطلاحا ملخ های دمنده مکنده باشند. کوادکوپتر دارای 4 موتور (ملخ) که هر دو موتور مخالف جهت هم حرکت می کنند. در ربات های عمود پرواز آن دو موتور که دارای جهت چرخش یکسان هستند باید دارای ملخ یکسان باشند. اگر کمی به شکل ظاهری ملخ های مکنده دمنده دقت کنید تفاوت دو ملخ را متوجه خواهید شد , حال در هر موتور , ملخ را باید به گونه ای انتخاب کنید که با چرخش موتور ملخ هوا را به سمت پایین هدایت کند.
جهت مشاهده انواع ملخ به لینک زیر مراجعه نمایید:

برد توزیع برق:
برد توزیع برق یک مدار بسیار ساده هست برای این که بتوان از یک باتری به چند اسپید کنترل برق یا همان باتری را توزیع کرد. برد توزع برق باید این ویژگی را داشته باشد که بتواند جریان بالا را منتقل کند. بنابراین برای توزیع برق هرگز از سیم های نازک و یا برد های ضعیف استفاده نکنید چرا که احتمال سوختن سیم در پروازو قطع شدن اتصالات و سقوط پرنده وجود دارد.

آمورش پروگرام کردن :speed control
به پروگرام کردن اسپید کنترل ها تعیین مینیمم و ماکزیمم اسپید کنترل ها نیز می گویند. برای پروگرام کردن اسپید کنترل ها باید ابتدا دسته سیم سه تایی که دارای سوکت می باشد در هر چهار اسپید با هم موازی کرد به گونه ای که سیم سوکت دار مخصوص دریافت پالس چهار اسپید , به گونه ای متصل شوند که سیم های هم رنگ به هم متصل شوند.سپس این چهار سیم موازی شده را به کانال 3 رادیو کنترل (که کانال گازمی باشد) متصل کرد. سپس گاز رادیو کنترل را تا اخر بالا برد و رادیو کنترل را روشن کرد, پس از این کار باید دسته سیم های اسپید که ورودی تغدیه اسپید کنترل هستندبا هم موازی شده و به صورت هم زمان به باتری متصل گردند. با این کار اسپید کنترل ها مقدار ماکزیمم را دریافته و دو بوق می زنند. پس از شنیدن این بوق دسته گاز را تا آخر پایین بیاورید , بعد از چند ثانیه اسپید کنترل ها مینیمم را هم دریافت کرده اند. بعد از این پروسه کمی صبر کرده و سپس باتری را جدا کنید.

حال سیم خروجی اسپید کنترل ها را که گلد کانکتور ها به آن لحیم شده است را می توانید به موتور ها وصل نمایید , دوباره باتری را متصل نمایید اما دقت داشته باشید هیچوقت زمانی که گاز رادیو بالا است باتری را به کوادکوپتر وصل نکنید. پس گاز را روی حالت مینیمم قرار داده و سپس باتری را وصل نمایید سپس آرام آرام گاز را زیاد کنید اگر تمام کارها را درست انجام داده باشید موتور های شما به صورت همزمان روشن شده و با هم شروع به کار می کنند, فقط توجه کنید که کلیه این تست ها را زمانی انجام دهید که موتور ها روی بدنه متصل شده و بدنه را کاملا سر هم کرده اید و همچنین تمام این تست ها را بودن آنکه ملخ بر روی موتور ها باشد انجام دهید.
تصاویر طراحی ربات های امدادگر ، مین یاب
")
در ادامه ی مطلب تصاویری بیشتری را ملاحظه خواهید کرد….
*** برای دیدن بهتر تصاویر روی آنها کلیک نمایید.




نانوربات ها

در آینده نانو ربات های هوشمند در مغز و بدن هر انسانی به تعداد زیاد وجود خواهند داشت و انسان را از ابتلا به انواع بیماری ها مصون می دارند حتی روند پیر شدن بشر را به تعویق می اندازند و نیز قدرت جسمانی و حافظه را تقویت می کنند. با استفاده از نانوتکنولوژی دستیابی به انرژی خورشیدی امکان پذیر خواهد شد. ادامه مطالب:
انرژی خورشیدی قابل تبدیل و استفاده به اشکال مختلف انرژی است و بشر را از منابع دیگر انرژی بی نیاز می کند. نانوربات ها ماشین های کوچکی هستند که برای انجام عملیاتی خاص و بعضا تکرارشونده با دقت بسیار بالا طراحی شده اند. نانو به معنی یک میلیاردم است. نانو ربات ها نه تنها قادر به تشخیص محل دقیق سرطان خواهند بود بلکه داروی مناسب برای از بین بردن سلول های سرطانی را تزریق می کنند. امروزه تحقیقات وسیعی در زمینه درمان بیماری هایی چون دیابت، بیماری های قلبی و ایدز در حال انجام است .نانوربات ها دارای امکانات بالقوه ای هستند که با اجتماع و قرارگیری به صورت کلونی قادرند به طور موشکافانه و دقیق از سیستم حفاظت کنند. در واقع با ساختاری اتمی یا مولکولی در یک فرایند شناخته شده قرار داده می شوند تا چرخه ای را کامل کنند. تکنولوژی نانورباتیک آنقدر سریع در حال پیشرفت است که به یقین زندگی انسان از اواسط قرن جاری به کلی متحول خواهد شد. این تغییرات شامل از بین رفتن بسیاری از بیماری ها، کاهش عوامل و عوارض بسیاری از امراض و حتی جراحی ها است. یکی از مهمترین برنامه های گسترش علوم رباتیک در جهان بیشتر کردن عمر بشر و مبارزه با پیری و عـواقب آن است. از دهه ۸۰ میلادی تا کنون کوچک سازی (مینیاتورسازی) از اهم فعالیت ها در زمینه علوم کامپیوتری بوده است. سرعت رشد تکنولوژی هر بیست سال دو برابر خواهد شد، در نتیجه تکنولوژی در سال ۲۰۵۰ حدود ۳۲ برابر از سال ۱۹۵۰ جلوتر خواهد بود. یکی از شاخه هایی که رشد تکنولوژی در آن بسیار چشمگیر است، دانش پزشکی است. با ساخت ابزار و وسایل پزشکی در آینده روند پیر شدن کند می شود و مبـارزه بـا بیمـاری هـا آسـان تـر و مطمئـن تـر خـواهـد شـد. در زمینه کالبدشناسی از نانورباتها به منظور تعیین محل دقیق آسیب استفاده خواهد شد. در شرایطی استفاده از نانو رباتهای زیستی ضروری به نظر می رسد که امکان دسترسی به عضو موردنظر دشوار بوده یا امکان پذیر نباشد یا حتی در مواردی که عواقب دردناک و دشواری توسط پزشک پیش بینی شود. برای طراحی یک نانوربات دانشمندان از مدل های طبیعی مثل ساختار رشته های DNAبهره می گیرند. با بهره گیری از دانش نانو تکنولوژی دانشمندان قادر به ساخت حسگرهای زیستی در ابعاد یک میلیاردم هستند.
اسلوب کار نانو ربات هایی که در داخل بدن کار گذاشته می شوند، شبیه سازی از محیط در فضایی سه بعدی است و تجزیه و تحلیل اطلاعات در آن ها بر مبنای روش های عددی است. نانوربات ها مانند انسـان بـه اطـلاعـات اطـرافشـان نیاز دارند. به دلیل نوع کار این نانو ربات ها در بدن، تجهیزات و یا سخت افزار این ماشین های مولکولی بسیار پیشرفته و ابتکاری است. در ســاخــت سـنـســورهــای زیـسـتــی تـنـهــا روش هــای مـیـکــروالـکـتــرونیکـی کـاربـرد دارد. نانورباتهای زیستی دارای سنسورهایی در ابعاد بسیار کوچک هستند و در عین حال به گونه ای طراحی شده اند که با شرایط زیستی بدن انسان سازگارند. نانوربات های زیستی با داشتن حسگرهای بسیار حساس از تجهیزاتی خواهند بود که امور پزشکی را به تدریج متحول می کند. در واقع مدلی از ماشین های مولکولی هستند که با روش های خاصی ارتباطات و اتصالات بین سلول های بیولوژیکی را کنترل کرده و بهبود میبخشد، به عبارتی روی نحوه عملکرد سلول ها نظارت کرده و کنترل صحیح آنها را به عهده میگیرد. روش کار این مدل های مولکولی بر اساس شبیه سازی در محیط سه بعدی است.
۱-۲انواع نانو ربات ها
۱٫ پرنده
۲٫ خزنده
که این دو نوع نانو ربات علاوه بر بزشکی در مصارف نظامی هم کاربرد دارند.
۱-۲-۱نظامی
در زمان های قدیم در جنگ بین ۲ کشور از سلاح های سرد و اولیه استفاده می شد که از معایب آن می توان به طولانی بودن زمان جنگ و هزینه ها گزاف آن اشاره کرد.پس از اختراع سلاح های گرم و از جمله تفنگ نحوه جنگ بار دیگر دگرگون شد و اکنون این نوع جنگ ها جای خود را به جنگ غیرمستقیم و سلاح های اتمی داده اند
وزارت دفاع آمریکا طی یک مصاحبه این چنین بیان نمود که در آینده سلاح های جدید در جنگ نانوربات ها هستند و استفاده از آن ها به این صورت خواهد بود که به صورت گروهی وارد بدن فرد خاصی شده و با آزادسازی سم و یا برش قسمت های حساس بدن،او را از پای درخواهند آورد.همچنین از این نانوربات ها می توان برای جاسوسی در جنگ استفاده نمود.آن ها می توانند به پایگاه دشمن رفته و اطلاعات نظامی شان را فاش کنند.
۱-۲-۲پزشکی
پزشکان و داروسازان همواره به دنبال راه های مناسبی برای شناسایی و درمان بیماری ها بوده اند.یکی از روش های خلاقانه که در چندین قرن پیش به وجود آمد ، عمل جراحی است
این روش توسط دانشمند بزرگ و معروفمان ، ابن سینا به وجود آمد. عمل جراحی علاوه بر مزایای بی نظیر خود مشکلاتی دارد
از جمله این که دوره نقاهت بیمار بعد از عمل طولانی است و همچنین عوارض جانبی نیز دارد و در بعضی از موارد نیز ممکن است بیمار طی عمل جراحی جان خود را از دست بدهد از معایب دیگر آن این است که برای بیماران ضعیف که قوه بدنی ندارند ، غیر ممکن است.این در حالی است که در نانوجراحی این مشکلات از بین می رود
با استفاده از نانوجراحی می توان سخت ترین اعمال جراحی حاضر مانند مغز و غلب را به صورت سرپایی انجام داد.در این جراحی نانوربات ها وارد بدن شده و عضو بیمار را شناسایی و به صورت گروهی آن را درمان می کنند.در این جراحی ، پزشک جراح در نقش ناظر دستورات لازم را به نانوربات ها منتقل می کند و بر کار آن ها نظارت دارد
از دیگر کاربردهای نانوربات ها دارورسانی هدفمند است.در حالت معمولی وقتی بدن بیمار دارو را به وسیله تزریق و یا خوردن دریافت می کند ، دارو وارد رگ های خونی شده و به تمام قسمت های بدن انتقال می یابد.از معایب این نوع دارورسانی به وجود آمدن عوارض جانبی و همچنین حداقل تاثیر گذاری بر قسمت بیمار است
در دارورسانی به وسیله نانوربات ، ربات با استفاده از حسگرهای خود قسمت بیمار را شناسایی می کند و دارو را به آن تزریق می کند.مزیت این نوع دارورسانی این است که دارو فقط به قسمت بیمار بدن می رسد و عوارض جانبی نیز از بین می رود.به این دلیل دیگر درمان بیماری هایی که نیاز به شیمی درمانی دارند ، کاری طاقت فرسا نیست و به راحتی انجام می شود و اثرات مخرب آن نیز از بین می رود.
از دیگر مزیت های این نوع دارورسانی مصرف کمتر دارو و سرعت بالای آن است.زیرا سرعت دارورسانی با سرعت گردش خون که بسیار بالاست برابر می باشد.
۱-۳تجمع هوشمند
هوشمند بودن نانو ربات ها در جمع شدن در یک محل خاص برای انجام عملیات پزشکی و اینکه پس از اتمام ماموریت،در صورت لزوم، پراکنده شوند.
رفتار های مشارکتی و همکاری یعنی همکاری نانو ربات ها و هماهنگ عمل کردن آنها در ماموریت ها ، گاهی عملکرد دسته جمعی نانو ربات نتیجه بهتری دارد.
۱-۴خود ترمیمی نانو ربات ها
برخی نانو ربات ها باید قادر باشند که به طور اتوماتیک خودشان را اسمبل کرده یا همانند موجودات تک سلولی تکثیر یابند و نیز در صورت صدمه دیدن بتوانند خودشان را تعمیر کنند.
برنامه ریزی و پردازش اطلاعات پردازش اطلاعات جمع آوری شده از محیط بیولوژیک و برنامه نویسی کردن برای نانو ربات ها از اهمیت ویژه ای برخوردار است .
از نظر عملکردی نانو ربات ها به دو دسته تقسیم می شوند:
۱-۴-۱ربات های خودمختار: هر کدام از نانو ربات های این دسته به طور جداگانه دارای یک نانو کامپیوتر است که نانو ربات را کنترل کرده و باعث می شود که نانو ربات مستقل عمل کند.
۱-۴-۲ربات های : Insect این نوع ربات ها در یک ناوگان نانورباتیک قرار دارند که همگی تحت یک کامپیوتر مرکزی کنترل می شوند.
۱-۵ مزایا نانو ربات ها
تا الان تقریبا هر چه گفته شد مزایا نانو ربات ها بود ولی به طور خلاصه میتوان چنین گفت
نانوربات ها ماشین های کوچکی هستند که برای انجام عملیاتی خاص و بعضا تکرارشونده با دقت بسیار بالا طراحی شده اند
یکی از قابلیت های دیگر نانو ربات ها قابلیت خود تکثیریست
هم چنین با شرایط زیستی بدن انسان سازگارند.
آنها از هوش ماشینی در سطحی پیشرفته برخوردارند تا بهترین گزینه را در جهت تشخیص بیماری انتخاب نمایند. به عنوان مثال سرطان که شایع ترین بیماری لاعلاج است
آنها نه تنها قادر به تشخیص محل دقیق سرطان خواهند بود بلکه داروی مناسب برای از بین بردن سلول های سرطانی را تزریق می کنند. . در مرحله بعدی نیز به درمان سلولی اقدام می کند که با تزریق دارو به سلول ها همراه است.مزیت این روش این است که در روش های پیشین سلول های زنده هم از بین می رفتن ولی در این روش فقط سلول آسیب دیده نابود میشود
به دلیل قابلیت خاص نانو ربات ها میتوان از ان ها در مکان هایی که امکان درسترسی به عضو موردنظر دشوار بوده یا امکانپذیر نباشد یا حتی در مواردی که عواقب دردناک و دشواری توسط پزشک پیش بینی می شود استفاده کرد
ترمیم بافت های آسیب دیده، رفع لخته و بازکردن رگ های مسدود قلب و ساخت یک عضو مصنوعی به جای ارگان آسیب دیده در بدن نیز برای نانو ربات ها امتیاز محسوب میشود
مهمترین مزایای نانو ربات، دوام فوق العاده بالای آن است. تحقیقات نشان داده اند که بنا به نیاز و نحوه طراحی نانو رباتها، میتوان آنها را در طول سالیان متمادی و حتی یک قرن بدون اینکه ذرهای از عملکرد آنها مختل شود، مورد استفاده قرار داد
همچنین
با دوام هستن
زمان عملکرد انها بسیار کم است زیرا جابجایی انها محدود بوده پس فرایندها با همان سرعت رخ میدهند ولی با زمان بسیار کمتر
همچنین چون بسیار کوچک اند احتمال میرود از سوی بدن به عنوان عوامل بیماری زا شناخته نشوند
ولی معایبی نیز دارند.
چون بسیار کوچک هستن ممکن است هنگام عطسه کردن از بدن فرد خارج شود-
یکی دیگر از اشکالات نانو ربات ها شکل ظاهری نانو ربات پرنده است زیرا به شکل مرغ مگس خوار است که این نوع حشره فقط در آمریکای لاتین و آمریکای جنوبی یافت میشود ، همچنین احتمال جلب توجه تمام دنیا به ظاهر این ربات کوچک هم بسیار زیاد است.
۱-۶ منابع انرژی برای نانو ربات ها
مؤثر ترین روش برای این که نانو ربات ها مدام در حال حرکت و فعالیت باشند(در هر محیطی نه صرفا محیط بیولوژیک)، ایجاد منابعی از انرژی است که از محیطی که نانو ربـات در آن مـشـغـول بـه کـار اسـت فـراهـم شـود. انـرژی جـنـبـشـی سـیـال، اشـعه های الکترومغناطیسی که از نور ساطع می شوند گزینه های مناسبی برای منبع انرژی هستند، که این اشعه ها برای فضای کاری باز مورد استفاده قرار می گیرند. همچنین استفاده از تغییرات دمایی یا کم و زیاد شدن نور نیز گزینه مناسبی هستند. اما برای یک فضای کاری گسترده انرژی تولید شده از ارتعاش مناسب تر خواهد بود که در محیط های مختلف از جمله محیط بیولوژیک می توان از آن استفاده کرد.
۱- ۷ اجزای نانو ربات
بنا به نوع کاربری نانوربات، اجزای آن تغییر می کنند اما اجزای بیان شده در این قسمت، اجزای اصلی نانو ربات ها هستند که در هر نانوربات صرف نظر از نوع کاربرد وجود دارند .

-۷-۱نانوسنسورها
نسل جدید سنسور ها، در مقیاس نانو، به سه دسته تقسیم می شوند:
سنسورهای فیبر نوری (اپتیکی)
سنسورهای مکانیکی
سنسورهای الکترونیکی
۱-۷-۱-۱ نانو سنسورهای اپتیکی
از این نانوسنسورها برای مطالعه متابولیسم در سلول های زنده استفاده می شود. پروب های فـــیـــبـــــر نـــــوری ســـــر بــســیـــــار نـــــازکـــــی دارنـــــد (۵۰۰-۲۰ نـانـومـتـر.) هنگامی که نور به این فیبر تابیده می شود، این سر نازک میدان ناپایداری تولید می کند.زیرا قطر این سر فیبر از طول موج نور کمتر است.وضوح تصویر با این پروب ها بسیار زیاد است. به دلیل این که این میدان ناپایدار حـجــم کــوچـکــی از اطــراف خــود را تـحــریـک میکند.
۱-۷-۱-۲نانوسنسورهای مکانیکی
در مقیاس نانو پیوندهایی قوی بین ساختار ها بـا خـواص مکانیکی یا الکترونیکی یا شیمیایی وجود دارد که ساخت وسائل نانومتریک بسیار حساس به محیط و مواد شیمیایی را امکان پذیر مـی سـازد. بـه وسیلـه ایـن حساسیت بسیار بالا تـغـیـیــر شـکــل هــای مـکــانیکـی و سیگنـال هـای گرمایی وآکوستیک قابل تشخیص هستند.
۱-۷-۱-۳نانومدیسین
نــــــانــــــومـــــدیـــســـیـــــن در واقـــــع اســـتـــفـــــاده از نــانـوتکنـولـوژی در درمـان، تشخیـص و کنتـرل سیستم های بیولوژیک است،که شامل شناسایی هـدف مـربـوطـه و انـتـخاب حامل های مناسب برای دست یابی به پاسخ های مناسب و حداقل سـاخـتـن اثـرات جـانـبی داروها است. در زمینه نـانـومـدیـسـیـن، نـیـازی بـه تـغـیـیـر دادن تـرکیبات دارویی نبوده و فقط طریقه حمل آن باید تغییر کند. این سیستم دارای یک حامل است که دارو توسط آن قسمت حمل می شود. مشخصه مهم یک سیستم دارو رسان مؤثر، توانایی برای انجام انتقال هدف دار و کنترل شده دارو است. برای ایـن مـنـظـور داروهـا باید باسرعت مناسبی آزاد شوند. آزاد شدن سریع دارو باعث عدم جذب مناسب و اثرات جانبی دیگر دارد. به علاوه باید توجه داشت که دارو هنگام حمل تجزیه نشود، بـرای هـمـیـن داروهـا را بـایـد در مـحـفـظـه هـایی (کپسول هایی) قرار داد. ماده حامل دارو باید با دارو سازگار بوده تا دارو به راحتی با آن پیوند برقرار کند.
۱-۷-۲نانومحرک ها
نانومحرک ها عملکرد این المان در مقیاس ملکولی ایجاد حرکت، نیرو، سیگنال یا ذخیره کردن اطلاعات است. این ماشین ها انرژی ذخیره شده الکتریکی را به حرکت مکانیکی تبدیل می کنند. این تبدیل به دلیل وجود ارتباطات قوی بین ساختار ها است.به طور کلی کنترل حرکات مکانیکی در مقیاس ملکولی یکی از اهداف اصلی نانوتکنولوژی است.ماشین های ملکولی بسیار مورد توجه هستند زیرا:
بازده بسیار بالا یی دارند.
به دلیل خاصیت خود ترمیمی برای استفاده به تعداد انبوه قیمت مناسبی خواهند داشت.
به طور طبیعی در بدن وجود دارند.
۱-۷-۳نانومانیپیولیتور
نانومانیپیولیتور سیستمی است که به کمک آن و سیستم های بصری ، می توان ملکول ها و ذرات نانومتر یک را لمس، مشاهده و جابجا کرد.
۱-۸کاربردهای نانو پزشکی
کاربردهای رباتیک نانو در پزشکی عبارتند از: تشخیص زود هنگام و هدفمند با مواد مخدر تحویل برای سرطان، ابزار دقیق پزشکی، جراحی، نظارت بر فارماکوکینتیک از دیابت، و مراقبت های بهداشتی است [۲۸-۲۹].
۱-۸-۱نانو جراحی
روش های جراحی کلاسیک به صورت ماکرو هستند؛ اما بعضی از جراحی های خاص مثل جراحی چشم نیازمند وسایل و ابزار ظریف تر و کوچک تر شدند. لذا میکرو جراحی ظهور پیدا کرد و در چند سال اخیر کوچک سازی، پیشرفت های زیادی در جراحی ایجاد کرده است. اولین مزیت نانوجراحی کاهش شوک ها و زخم های ناشی از جراحی کلاسیک است. همچنین شکاف و برش در نانوجراحی وجود ندارند. همین مسائل باعث بهبودی سریع تر بیمار می شود. جراحی های معمولی سنگین و طاقت فرسا هستند؛ هم برای بیمار و هم برای جراح از یک طرف بیمار دچار ترس و دلهره، دردهای متعدد و زمان بهبودی طولانی شده و از طرف دیگر جراح به تمرکز، برای مدت طولانی احتیاج دارد تا جراحی را کامل و دقیق انجام دهد. اشتباهات جراح که ناشی از خستگی و دید کم هستند اجتناب نا پذیرهستند. در نانوجراحی، جراح از دسته هایی برای فرمان استفاده می کند تا بازوهای نانو ربات را که مجهز به ابزار جراحی کوچک هستند کنترل کرده و به محل مورد نظر برساند. بازوی دیگر نانو ربات دوربینی حمل میکند که جراح می تواند محیط درون بدن را مشاهده کند.
۱-۸-۲نانو ربات عنکبوتی از جنس مولکول DNA
دانشمنـدان در آمـریکـا یـک ربـات مـولکـولـی از جنـس مولکول وراثتی DNA خلق کردهاند که مانند عنکبوت در امتداد یک مسیر ساخته شده از کد شیمیایی برای حیات راه میرود. این ربات فقط چهار نانو متر قطر دارد که چهار میلیاردیوم یک متر است. این نانوربات، شبیه به یک عنکبوت چهار پا طراحی شده است. این هیولای مینیاتوری در امتداد زنجیرههای DNA متصل شده به هم حرکت میکند که درست به روش حرکت رباتهای صنعتی در امتداد یک خط مونتاژ است. بدن این عنکبوت از پروتئین معمولی موسوم به <استرپتاویدین> ساخته شده است. این دستاورد که شرح آن در مجله علمی نیچر به چاپ رسیده گامی دیگر در آزمایشات مقیاس نانو است که در آینده به خلق ارتشی از نانورباتها برای پاکسازی عروق و ترمیم بافتهای آسیب دیده منجر خواهد شد .[۱۴]
-۸-۳به کارگیری نانوربات برای جراحی
نانوربات قابل کنترلی که قادر است در جراحی سرطان مورد استفاده قرار گیرد در حال ساخت است. دقت کار این نانوربات بیش از فناوریهای رایج امروزی است. این نانوربات که دقت بالا تنها یکی از مزایای آن است، قادر است در طول ۵ تا ۱۰ سال آینده به خدمت جراحان درآید. داخل این دستگاه موتورهای بسیار کوچکی قرار دارد که این دستگاه را قادر میسازد تا به نقطهخاصی از تومور برود. این در حالی است که با هیچ دستگاه جراحی نمیتواند با دقت میلیمتری روی تومورها کار کرد؛ اما نانورباتها این دقت را زیر نانو پایین میآورند. با این نانوربات میتوان تستهای پاتولوژی یا تشخیص طبی را طی چند دقیقه انجام داد و حتی میتوان دارویی را بهمنظور از بین بردن تومور با دقـت وارد بدن بیمار کرد. هماکنون طراحی الگوریتمهای حرکتی نانوربات تست فعالیتهای مختلف این نانوربات در حال انجام است.
استفاده از نانوربات به معنی کنار زدن جراحان در فرایند جراحی نیست بلکه جراحان باید بهصورت ناظر روی فعالیت نانورباتها در طول جراحی نظارت داشته باشند و مانند نقش هدایتی خلبان در این مسیر ایفای نقش کنند.
۱-۸-۴ساخت نانو ربات کربنی برای حمل دارو در بدن بیماران
نانو ربات کربنی به ابعاد ۱۰۰ نانومتر به وسیله دستگاه های کنترل شده، داروهای تـزریقی را در بافت بدن بیماران هدایت می کند. نانو ربات کربنی قابلیت حمل هر دارویی را در بدن دارد. پس از تزریق دارو به این دستگاه دارو به تمام بافت های بیمار به خصوص بافت های سرطانی و ایدزی رسیده و آن ها را از بین می برد. در حال حاضر شبیه سازی کامپیوتری این طرح انجام شده است.
۱-۸-۵فناورینانو در خدمت پزشکی
در واقـع تـاکنـون نـانوابزارهای کاملا کاربردی بسیاری مانند موتورها، حسگرها، محاسبهگرهای زیست مولکولی و نانوترانزیستورها ساخته شده است. اما در حال حاضر عمدهترین چالش، مجتمعسازی چندین بخش مجزا از این نانوابزارها روی یک نانوربات قابل کنترل است. در این راه، شبیهسازیهای نظری به عنوان ابزاری مفید و ارزشمند برای مجتمعسازی سیستم و آزمایشپذیر شدن آن به شمار میآید.
به هر حال، اطمینان از دستیابی به کنترل مناسب بر چنین نانوماشینهایی یکی از موضوعات بحثانگیز در راه محقق شدن نانورباتها است و در واقع میتوان از طریق روشهـای نـانومکاترونیک (nanomechatronics) به ارزیابی و محاسبه آن پرداخت. استفاده از نانورباتها در انسان پس از انجام صدها آزمایش با تمام جزئیات از ابتدا روی موشهای آزمایشگاهی ممکن خواهد شد. در واقع، این روند طولانی آزمایشگاهی، برای هر فناوری زیست پزشکی جدیدی انجام میشود. مانند فناوری نانوپوستهها که با موفقیت روی موشهای آزمایشگاهی برای مبارزه با سرطان به کار گرفته شد.
استفاده از این نانوپوستهها نتیجهِ پیشرفتهای به دست آمده در فناوری نانو است و بـه عنـوان یک روش درمانی- دارویی نتایج مثبت و امیدوارکنندهای داشته است. با پیشرفت بیشتر در حرکت به سمت نانورباتها، میتوان به نتایج مؤثرتر دیگری در زمینهِ مراقبتهای بهداشتی امیدوار بود.
۱-۸-۶نانوربات در بدن انسان
بـــرای رســیـــدن بـــه بــیـشـتــریــن کــارایــی یــک نانوربات در بدن انسان، نانورباتها در حالت ایدهآل نباید قطری بزرگتر از ۳ میکرون داشته بــاشـنــد. ایــن نــانـــوربــات بــایــد دارای مـبــدلهـا (transducers) و مــحـــــرکهـــــا (actuator)هــــای کـارآمـد بـا هـزینـه مصرفی کم بوده و بتوانند به محـض قـرار گـرفتـن درون بـدن انسـان بـه طور موثری با محیط پیرامون خود تعامل کنند.
بــرای پــاســخدهــی مـؤثـر در زمـان واقعـی بـه مـحیط، در این نانوربات باید سیستم مجتمعی تـعـبیه شده باشد. به همین دلیل انتظار میرود هنگام نیاز به چنین پاسخهای حرکتی با استفاده از مـوتورهایی برای کشش ربات حرکتهای کـنـتـرلـی لازم را فـراهم کرد کاری که با برخی دخـــالـــتهـــای زیـســت پــزشـکــی قــابــل انـجــام است.کنترل نانورباتی مبتنی بر حسگرها را هم میتوان با استفاده از نانوحسگرهای حرارتی یا شیمیایی انجام داد.
تحقیقات در زمینه نانو ربات هایی که مجهز به حـسـگـرهای زیستی و دارویی باشند در سطح گسترده ای در حال انجام است.
۱-۹ ارتباطات میان نانو ربات ها
برای ارتباط بین نانو ماشین ها چندین روش روش پیشنهاد شده استاز جمله نانو مکانیکی،صوتی،الکترومغناطیسی، شیمیایی یا مولکولی [۱] .ارتباطات نانو مکانیکی به دلیل نیاز به تماس فیزیکی بین فرستنده و گیرنده در بسیاری از سناریوها مناسب نمی باشند.در ارتباطات صوتی،پیام در موج های صوتی کد می شود و بطور مشابه در ارتباطات الکنرومغناطیس هم اطلاعات از طریق امواج الکترومغناطیس مدوله شده منتقی می شوند.اشکال اصلی هر دو روش اندازه و پیچیدگی فرستنده و گیرنده هایی است که برای برقراری ارتباط نیاز است.آن ها نمی توانند به آسانی با نانو ماشین ها مجتمع شوند.ارتباطات مولکولی یک روش جدید و بین رشته ای است که تکنولوژی های نانو ،بیو و ارتباطات را در بر میگیرد و به جای امواج الکترومغناطیسی ،برای ارسال اطلاعات از مولکول استفاده می کند.در ارتباطات مولکولی ،پیام درون مولکول ها کد می شود[۴] .فرستنده و گیرنده های مولکولی در پاسخ به یک دستور داخلی ،قادرند به مولکول های خاصی واکنش نشان داده و بقیه مولکول ها را رها کنند.در ایجاد سیستم های مولکولی از مکانیسم های ارتباطی بیولوژیکی موجود استفاده می کنیم[۲۷] .
۲)مروری بر تحقیقات انجام شده:
۲-۱ درمان بیماری HIV با استفاده از نانو ربات ها
این مقاله به کاربرد نظری نانو ربات ها در درمان بیماری ایدز است. هیچ تکنولوژی برای درمان بیماری ایدز وجود ندارد. این نانو ربات ها با استفاده از نانو سنسور ها ویروس WBC’S ایدز را تشخیص می دهد. سیستم ایمنی بدن بیمار مبتلا به ایدز به طوری است که او می تواند خود بر این بیماری دفاع کند. [۵]
۲-۲ بررسی گسترش و آزمایش اندفکتور نانو ربات
در تحقیق کنونی مجری های نهایی مورد بررسی قرار گرفتند. مجری نهایی به منظور تطابق و مقاوم بودن بیشتر در ساختار خود از پلی آمید ها استفاده می کند. برای اتصال، از الکترودهای فلزی استفاده شده است. سودمند بودن این مجری نهایی با انجام آزمایش التروفیزیولوژی و الاستوگرافی بر روی سلولهای … مورد تایید قرار گرفت و نشان داده شد. نتایج بیانگر آن است که مجری نهایی AFM جهت اندازی گیری مایعات سلولهای زنده بسیار مناسب است. درضمن، این وسیله جدید ممکن است زمینه ای جهت پیشرفت نشانگرهای بیماری در یک سلول را با ترکیب الکتروفیزیولوژی و الاستوگرافی فراهم آورد. [۷]
۲-۳ نانو ربات با توانایی حمل محموله های مولکولی به سلول ها
در این مقاله یک نانو ربات که توانایی حمل محموله های مولکولی به سلول ها را داراست مورد بررسی قرار گرفته است. به علاوه این نانو ربات قادر است پارامترهای مختلف سطح سلول را جهت فعال سازی و تنظیم ساختار خود جهت درگیر شدن با سلول به نحو مقتضی به منظور رساندن محموله به آن، مورد بررسی قرار دهد. این ربات قابلیت بارگذاری مواد مختلف را دارا بوده و توسط یگ گیت منطقی تحت کنترل قرار میگیرد در این تحقیق از گیت های اند مختلفی استفاده شده و کارایی آنها در انتخاب نانو رباتها نشان داده شده است. به منظور صحه گذاری و تایید این امر، نانو رباتها با ترکیبی از آنتی بادی ها بارگذاری شدند و با سیگنال دادن جهت کشف بافت تحریک شدند. این نمونه می تواند جهت امور مختلف کشف بافت مورد استفاده قرار گیرد.[۹]
۲-۴ کنترل PNA ها جهت تطابق در محیط هایی که با تغییر دما و PH
در این تحقیق خواص مکانیکی مختلف PNA ها جهت تطابق در محیط هایی که با تغییر دما و PH همراهند مورد بررسی قرار گرفته است. در این شبیه سازی دینامیکی هر بازو شدیدا منعطف درنظرگرفته شده است تا بتواند فضای کاری و ارسال محموله های مختلف را گسترش دهد.نتایج ما مبین آن است که PNA ها به سادگی میتوانند خود را برای کار کردن با چندین هدف نانو تطابق دهند. PNA ها ساختار منحصر به فردی داردند که میتواند محموله های مختلف را تشخیص داده و با آنها کار کنند. در حقیقت با تلفیق دو مشخصه مهم (دما و PH) می توان محموله هایی با ابعاد معین را به نحو مطلوب تری دریافت نمود. این ایده میتواند جهت مقایسه چند حالت مختلف و نهایتا انتخاب بهترین آن شرایط ها مورد استفاده قرار گیرد. [۱۱]
۲-۵ نانو رباتها جایگزین جراحی قلب
این تحقیق کاربردهای فعلی کامپیوتر را در زمینه جراحی مورد بررسی قرار می دهد. نانورباتیک، تکنولوژی ساخت ماشین ها و ادواتی در مقیاس نانو می باشد. نانورباتها ابزارهایی هستند که در ابعاد نانو یا مولکولی ساخته شده اند. از آنجایی که هنوز بیونانو ربات مصنوعی ای ساخته نشده است، هنوز این یک مفهوم فرضی در زمان حاضر است.
این مقاله به بررسی جایگزین کردن نانو رباتها در عمل بای پس قلب که خطرات بزرگی را متوجه بیمار میکند خواهد پرداخت. علیرغم تبحر جراح، هنوز این امر(جراحی با بانانورباتها) می تواند خطرات بسیار بالایی داشته باشد. به هر حال نانو رباتها اگرچه ابزار ایمنی نیستند اما از سرعت و عملکرد بهتری در این عمل برخوردارند. این می تواند متد بسیار مناسبی جهت انجام بای پس بدون نیاز به عمل جراحی باشد. نانو رباتها عموما در ابعاد… هستند تا بتوانند با همکاری یکدیگر بتوانند بای پس کنند. [۱۸]
۲-۶ مکانیسم های ارتباطی درنانوشبکه های بیولوژیکی مولکولی
نانوتکنولوژی یک زمینه تحقیقاتی با کاربردهای گوناگون می باشد انفجار تحقیقاتی اخیر در این زمینه در ترکیب با یافته های مهم در بیولوژی مولکولی یک ارتباط بیو – نانورباتیک جدید ایجاد کرده است در مقیاس نانو یک نانوماشین اساسی ترین واحد کاربردی در نظر گرفته می شود نانوماشین ها اجزای ریزی هستند که قادر ند کارهای بسیار ساده را در محیط پیرامون خود انجام دهند به ارتباطات و اتصالات نانوماشین ها در مقیاس نانو نانوشبکه گفته می شود دراین مقاله ارتباطات نانو شبکه ها در برد کوتاه با استفاده ازموتورهای مولکولی و سیگنالینگ کلسیم توصیف شده است واضح است که بسیاری از مسائل دراین زمینه نیاز به تحقیق بیشتری دارند.
نانو ماشین ها با استفاده از نانو شبکه می توانند به هم متصل شده و کارهای پیچیده تری راانجام دهند.اولین پیشرفت ها در نانو شبکه ها از سیستم های بیولوژیکی مبتنی بر ارتباط مولکولی الهام گرفته شده اند.ارتباطات مولکولی که در نانو شبکه ها بکار گرفته می روند از نظر مصرف انرزی،قابلیت اعتماد و مقاومت بسیار مناسب می باشد. [۲۰]
۲-۷ محاسبه انرژی پروتئینها و کاربرد آن در بیونانورباتیک
بیونانورباتیک علم کاملا جدیدی است که یکی از مهم ترین اهداف آن ساخت نانوربات های زیست سازگاری می باشد که بتوانند به عنوان جانشینی برای درمان های تهاجمی بیماری ها به کار روند و عوارض جانبی محدودتری نیز داشته باشند. در این رابطه پروتئین ها بسیار مورد توجه قرار گرفته اند و هدف از انجام این تحقیق، محاسبه انرژی پروتئین ها با استفاده از مدل میدان نیروی آمبر، پیشنهاد شده توسط کرنل، می باشد. برای این منظور نیاز محاسبه مختصات کارتزین تمامی اتم های آن پروتئین بر حسب زوایای دی هدرال (Dihedral) و روتامر (Rotamer) می باشد که این مهم نیز با استفاده از روش سینماتیک مستقیم موقعیت مرجع صفر انجام گرفته است. اهمیت انجام این محاسبات در ارائه مدلی برای مطالعه تحلیلی تغییر فرم پرتئین ها می باشد. این تغییر فرم ها یکی از خصوصیات سینماتیکی و دینامیکی پروتئین ها بوده که به عنوان یک نانوجوء، برای طراحی و ساخت بیونانوربات ها به کار خواهد رفت. این اطلاعات در کتابخانه از نانو اجزاء، که به همین منظور به وجود آمده است، ذخیره می شود. [۲۱]
۲-۸ مدلسازی دینامیکی مانیپولاتور نانوربات AFM در جابجایی نانوذرات
در این مقاله جابجایی نانوذرات (nanoparticle) توسط پروب میکروسکوپ نیروی اتمی (atomic force microscopy) یا AFM به عنوان مانیپولاتور نانوربات و دینامیک نانومانیپولاتور مدلسازی خواهد شد. با حرکت راس ابزار نانومانیپولاتور یا صفحه مبنا در سرعت ثابت، نیروی اعمال شده از طرف نانومانیپولاتور بر ذره تا مقدار بحرانی که بتواند بر نیروهای چسبندگی (indentation force) و اصطکاکی بین ذره و صفحه مبنا غلبه نماید، افزایش می یابد و در این زمان، حرکت ذره بر صفحه مبنا آغاز میگردد که بسته به میزان نیروی اعمالی، اندازه ذره، جنس ابزار و ذره و صفحه مبنا می تواند حرکت لغزشی، چرخشی، و دورانی داشته باشد. نهایتاً امکان کنترل نیروی اعمالی لازم جهت حرکت مورد نظر و جابجائی ذره بر روی سطح مبنا بوجود می آید.
۲-۹ تحلیل نانوسینماتیک پروتئین ها و کاربرد آن در بیونانورباتیک
در این مقاله سینماتیک مولکولی برای تحلیل ساختارهای پروتئینی از منظر روابط رباتیک و به طور خاص با استفاده از روش موقعیت مرجع صفر مورد بررسی قرار گرفته است زیرا روش های تجربی مانند کریستالوگرافی و NMR اطلاعاتی در مورد کیفیت حرکت و تغییر فرم به دست نمی دهند . این روش، راه حلی بسیار بدیع و جدید را ارائه می کند که استفاده از آن در مقایسه با روش های رایج دارای مزیت هایی از جمله کم شدن قابل توجه زمان محاسبات می باشد . هدف از انجام چنین محاسباتی به دست آوردن خصوصیات سینماتیکی پروتئین ها به عنوان یک نانوجزء، برای طراحی و ساخت بیونانوربات ها بوده و این اطلاعات در کتابخانه ای از این اجزاء ذخیره می شوند .
روش های سینماتیک مولکولی بر مبنای روابط رباتیک روش های نوینی هستند که تنها در چند سال اخیر برای محاسبه تغییر فرم های مولکولی به کار می روند و هنوز راه زیادی تا تکامل آنها باقی مانده است.در ادامه این راه می توان به بررسی سینماتیک معکوس و لحظه ای،تحلیل فضای کاری و تحلیل دینامیکی این ساختار های بیولوژیک پرداخت. [۲۲]
۲-۱۰ سوخت رسانی به نانوربات ها
نانوتکنولوژی نوید کاربردهایی مانند رباتهای میکروسکپی برای سفر در درون بدن برای رساندن دارو و یا میکروجراحی در اینده را میدهد مهمترین مساله اعمال نیروی مناسب برای حرکت انها است زیرا در مقیاس های کوچک چسبندگی شاره ها بسیار بزرگ بوده و حرکت براونی باعث می شود همه چیز پیوسته تکان بخورد. با الهام از موتورهای بیولوژیک سلولهای زنده شیمی دانان در پی یافتن نحوه راه انداختن ماشینهای سایز میکرو و ابعاد نانو هستند.[۲۶]
۲-۱۱ شبیه سازی پارامترهای اثرگذار بر مدهای حرکتی در میکرو – نانو منیپولیشن
در این مقاله به بررسی مدهای دینامیکی حاکم بر منیپولیشن نانو ذرات با استفاده از نانو ذرات ربات AFM پرداخته شده است. با استفاده از مدل تماسی جانسون – کندل – رابرت و دیاگرام جسم آزاد ذره مدلسازی به منظور به دست آوردن مدهای حرکتی (غلتش – لغزش) ذرات صورت می گیرد. در ادامه با استفاده از دیاگرام جسم آزاد کانتیلیور به مدلسازی نیروهای وارد بر کانتیلیور درعملیات منیپولیشن می پردازیم. با حل معادلات ارایه شده قادر خواهیم بود نیروهای وارد بر ذره را بدست آوریم. از این نیروها در به دست اوردن تغییرات پارامتر y (نسبت نیروها) استفاده می نماییم. در ای مقاله تاثیر تغییر هر یک از پارامترهای Rp و g و y وf در شبیه سازی های مختلف بررسی می گردد، در انتها با استفاده از مدهای حرکتی برای تاثیرگذارترین پارامتر (شعاع نانو ذره Rp) به شبیه سازی محدوده تغییرات مدهای حرکتی پرداخته شده است. [۲۸]
۲-۱۲ شبیه سازی دینامیک حاکم بر میکروو- نانو منیپولیشن با استفاده از مُدهای حرکتی به منظور بررسی های بیولوژیکی
دراین مقاله به بررسی دینامیک حاکم بر میکرو- نانو منیپولیشن با استفاده از نانو ربات AFM پرداخته شده است، به منظور مدلسازی دینامیک حاکم بر منیپولیشن در ابتدا با استفاده از دیاگرام جسم آزاد کانتیلیور به مدلی دست می یابند که دینامیک حاکم بر کانتیلیور را بیان می کند و از حل این معادلات نمودار دینامیکی نیرو- زمان بدست می آید، با استفاده از دیاگرام جسم آزاد ذره، مدلسازی وشبیه سازی به منظور بدست آوردن مدهای حرکتی (غلتش- لغزش) ذره صورت می گیرد. با ترکیب دو مدل ارایه شده، مدلی که دینامیک حاکم بر ذره را بیان می کند، بدست می آید. با استفاده از این شبیه سازی، زمان و نیروی بحرانی حرکت که لحظه جدا شدن و ماکزیمم نیروی لازم جهت منیپولیشن را بیان می کند، بدست می آید. مشخص شدن این نیرو و زمان در بررسی های بیولوژیکی که ذره ممکن است در اثر جابه جایی تخریب شود از اهمیت بالایی برخوردار است. در این مقاله با تغییر پارامترهای موثر و استفاده از شبیه سازی های ارایه شده شرایط حرکتی (نیرو-زمان) در حالت های مختلف بررسی می شود. از این شبیه سازی ها در انتقال کنترل شده ذرات بیولوژیکی استفاده می نماییم


نحوه کار سنسور های مادون قرمز
در طبیعت ما رنگ هایی رو داریم که قابل دیدن هستند مثل : آبی ، زرد ، قرمز ، بنفش ، صورتی و … ، اما رنگ هایی هم وجود دارند که دیده نمیشوند ، به نظر شما در رنگین کمان چند رنگ وجود دارد؟ ۷ رنگ ! بله در رنگین کمان ۷ رنگ وجود داره که دیده میشه ، که عبارت هستند از :
قرمز ، نارنجی ، زرد ، سبز ، آبی ، نیلی ، بنفش

اما آیا رنگ دیگری وجود ندارد ؟
جواب مثبت است ، دو رنگ دیگر وجود دارد که ما با چشم غیر مصلح ان را نمیبینیم آن رنگها ماواری بنفش (بالاتر از بنفش) و مادون قرمز (پایین تر از قرمز ) است
در بازار الکترونیک شما با دیود های نوری به رنگ آبی زرد قرمز و … برخورد کرده اید و حتما از آنها استفاده هم میکنید ، به همین صورت دیود هایی داریم که نور مادون قرمز تولید میکنند که اگر انها را روشن کنید با چشم غیر مصلح دیده نمیشود و حتما باید با دوربین عکاسی یا فیلم برداری به آن نگاه کنیم ؛ به همین ترتیب گیرنده هایی داریم که قادرند نور مادون قرمز و شدت آن را تشخیص دهند که نمایی از شکل ظاهری انها در زیر آمده است.

اگر قبل از روشن کردن قرستنده در مقابل گیرنده با دستگاه مقاومت سنج (اهم متر) مقاومت دو سر گیرنده را اندازه بگیرید میبینید که مقاومت زیادی حدود ۱۰۰ کیلواهم دارد که تقریبا مثل یک کلید باز عمل میکند ولی هنگامی که فرستند را در نزدیکی گیرنده روشن میکنید مقاومت بین پایه های آن کم میشود و تقریبا مثل یک کلید بسته عمل می نماید .

وقتی کلید بسته است خروجی به صفر ولت و وقتی کلید باز است خروجی با مقاومت به ۵ ولت متصل میشود . حال اگر فرستنده دائما روشن باشد و یک جسمی جلوی رسیدن نور را به گیرنده بگیرد باز هم کلید باز است چون نور فرستنده به گیرنده نرسیده که آنرا وصل کند.

از این روش ، ما در روبات تعقیب خط برای پیدا کردن خط مشکی کِدر روی زمینه سفید و براق استفاده میکنیم .

به این ترتیب که اگر نور به طور کامل منعکس شد خطی در کار نیست اما اگر نوری منعکس نشد یا خیلی کم منعکس شد متوجه میشویم که روبات روی خط است .
BionicOpter سنجاقک هوشمند فستو
با BionicOpter فستو تسلط فنی خود را در بارهی بسیاری از خصوصیات پیچیدهی پروازی سنجاقک به نمایش گذاشت. درست مانند مدل طبیعی خود، این شی پرنده فوق سبک می تواند در تمام جهات پرواز کند، شناور شود، سُر بخورد بدون اینکه بالهایش متوجه تنش خاصی شود.
سیزده درجه آزادی برای یک پرواز عادی
علاوه بر کنترل مشترک متناوب فلپینگ و چرخش مجزای هر بال، هر یک از چهار بال، دارای دامنهی کنترلی متفاوتی میباشند. شیب بالها تعیین کنندهی جهت پیشروی هستند. کنترل دامنه باعث میشود پیشروی و حرکت و به جلو عادی باشد. با ترکیب این خصوصیات و کنترل از راه دور، سنجاقک میتواند در هر قسمتی از فضا ظاهر شود.
طراحی بسیار یکپارچه و سبک
این روش پروازی منحصر به فرد، به علت ساختمان سبک و عملگرهای یکپارچه، مثل سنسورها، عملگرها(Actuators) و اجزاء مکانیکی که همگی دارای کنترل حلقه بسته (Close loop) هستند و درکنار یکدیگر در فضایی تنگ به خوبی قرار گرفتهاند، ایجاد شده است.
سنجاقک کنترل از راه دور، فستو ارتباط بیسیم real-time، تبادل پیوستهی اطلاعات و همچنین قابلیت ترکیب ارزیابی سنسورهای مختلف و تشخیص رویدادهای پیچیده و شرایط بحرانی را به نمایش گذاشت.




ربات ها به تکیه گاه اصلی اکتشافات فضایی تبدیل شده اند. از مریخ نوردها گرفته تا ربات های سخنگوی انیمه در ایستگاه فضایی بین المللی، توانسته اند توانایی خود را در انجام کارهای مختلف اثبات نمایند. اما ربات های فضایی آینده چگونه خواهند بود؟ آژانس فضایی اروپا ویدئویی از طراحی های پیشرفته رباتیکی برای اکتشافات سیاره ای و قمری منتشر کرده است. این طرح های مفهومی شامل ربات های چندمنظوره هستند که برای اکتشافات فضایی خودکار و کمک به فضانوردان در انجام عملیاتشان در دنیای دیگر، طراحی شده اند.
آژانس فضایی اروپا (ESA) چندین دهه است که علاقه وافر خود را در زمینه رباتیک نشان داده و معرفی سال ۲۰۱۸ به عنوان زمان پرتاب مریخ نورد ExoMars این آژانس، نشان دهنده رشد بیشتر این علاقه می باشد. ویدئوی جدید ESA در مورد شکل آینده ربات های کاوشگر می باشد و همچنین در این ویدئو، این ربات های مفهومی در یک سناریوی قمری فرضی به کار گرفته شده اند.

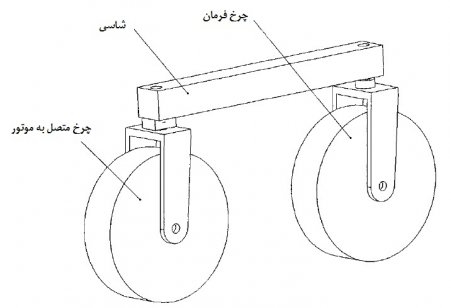
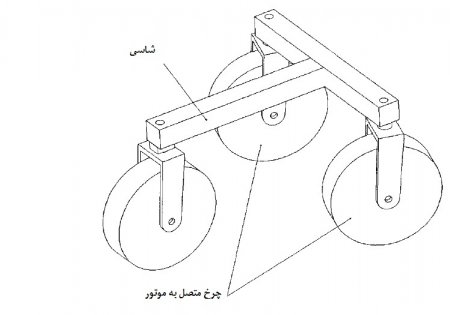
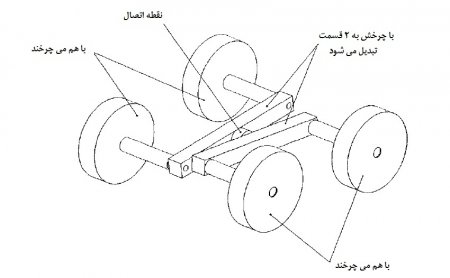
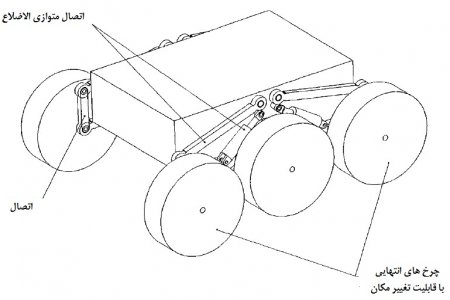
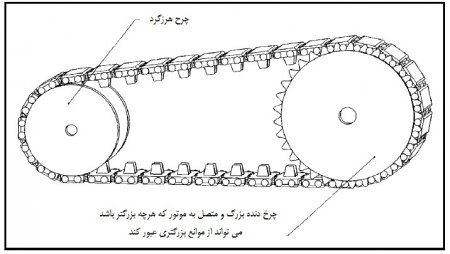
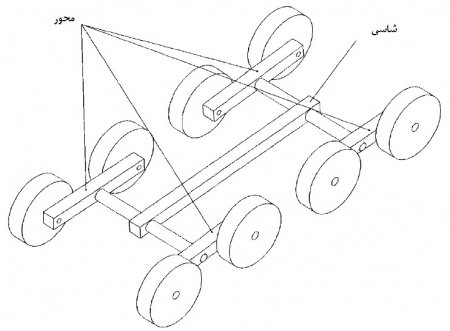
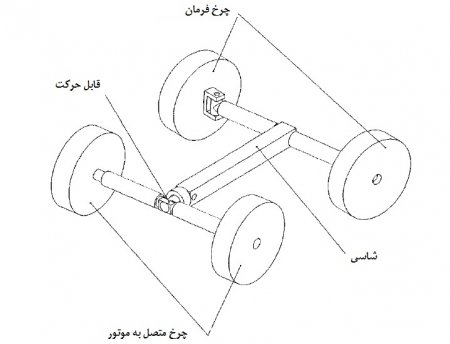
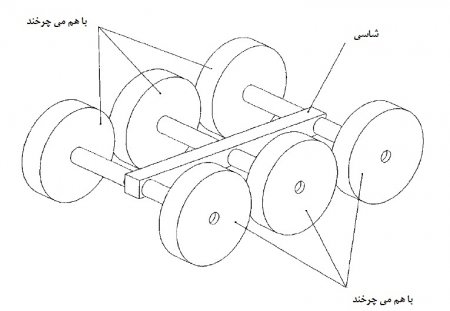
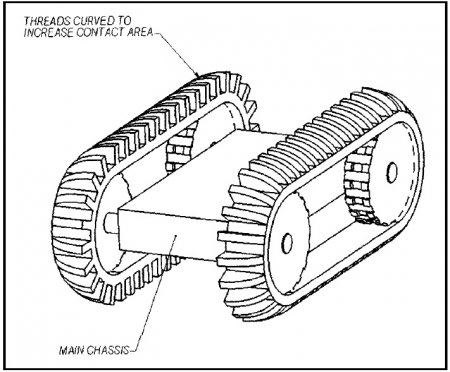
در اینجا تصویری از ماه نورد آینده را می بینید که از لیزر برای اسکن زمین مقابل خود استفاده می کند. در این مورد، رنگ قرمز لیزر نشان می دهد که این ماه نورد، زمینی سخت و شیب دار که حرکت بر روی آن دشوار می باشد را یافته است. چرخ های این کاوشگر ممکن است بیش از حد پیچیده به نظر بیایند ولی طراحی کلی این ربات کمی ساده می باشد اما دلیلی برای این کار وجود داشته است.

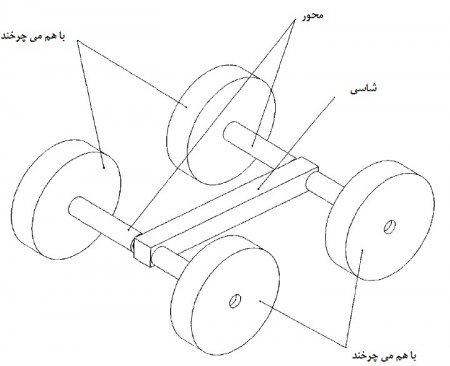
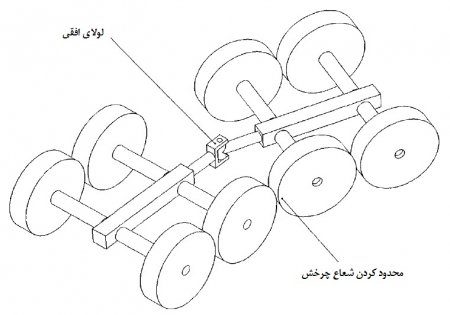
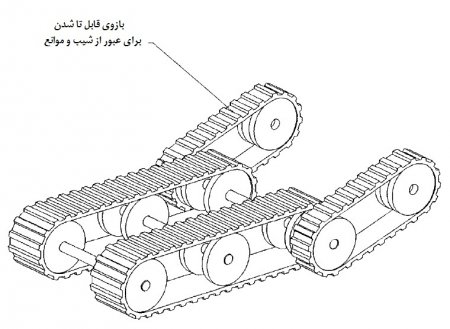
به جای گردش در اطراف شیب، این ماه نورد چرخ های خود را به منظور تبدیل آن ها به پا، باز می کند. سپس می تواند مانند یک حشره تپه ها را بپیماید.

بر روی زمین نیز یک مرکز کنترل ماموریت، مسیر این وسیله را با استفاده از یک صفحه نمایش مجازی از فعالیت های آن پیگیری می کند. در تصویر می توانید ببینید که این ماه نورد یک سنگ را برای جمع آوری نمونه شناسایی و نقشه برداری کرده است.

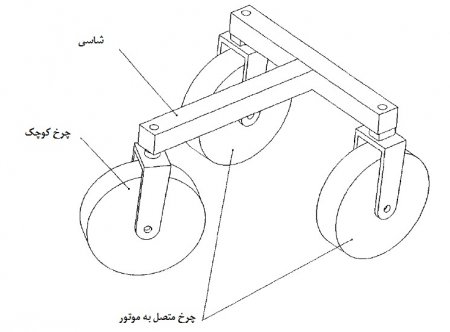
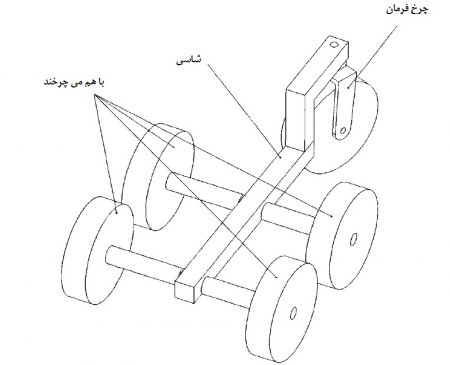
چرخ های تغییر شکل دهنده فقط برای راه رفتن نمی باشند. آن ها همچنین به جای بازو استفاده می شوند. در تصویر زیر می بینید که یکی از چرخ ها باز شده و ماژول مجموعه ای را از ماه نورد برداشته و از آن برای نمونه برداری سنگ استفاده می کند.

در طول سال ها در مورد مهاجرت به ماه بحث های فراوانی وجود داشت اما ظاهرا هیچ کس علاقمند به چگونگی تخلیه محموله ها پس از فرود یک ماه نورد بر روی سطح ماه نبوده است. ESA با این طراحی رباتیکی، راه حلی را در این زمینه نشان داده است به طوری که این ربات می تواند محموله ها و دیگر ماژول ها را در دست گرفته و آن ها را به پایگاه قمری حمل کند.

در اینجا تصویری از ماژول حمل شده توسط بالابر این ربات را برای حمل و نقل پس از موقعیت یابی تخلیه نهایی آن می بینیم.

پس از آنکه محموله در مکان خود قرار گرفت، بالابرنده دچار تغییر وظیفه شده و ماژول را برای اتصال به دیگر قطعات سازنده پایگاه، در مکان مناسب خود قرار می دهد. در این تصویر به نظر می رسد که این ماژول، پوششی برای یک زیستگاه باشد.
یک مشکل آزار دهنده که در ساخت ایستگاه فضایی بین المللی آشنا می باشد، این است که ساخت و ساز فضایی تنها مشکل در اتصال ماژول ها نمی باشد و علاوه بر آن، کار ملال آور قلاب کردن خطوط برق، شلنگ های هوا، لوله های آب، لینک های داده ها و غیره نیز وجود دارند. این کارهای خسته کننده بر روی زمین به اندازه کافی سخت می باشند اما بر روی ماه با دستکش های متورم پلاستیکی عملی فوق العاده دشوار به حساب می آیند.

در تصویر بالا، طرح ربات teleoperator آژانس فضای اروپا را می بینیم که یک خط سرویس را متصل می کنند. با توجه به پیچیدگی سیستم، ربات ممکن است این کار را خودکار و یا تحت هدایت های یک فضانورد که درون پایگاه قرار دارد، انجام دهد.

در اینجا با چیزی روبه رو هستیم که در ساخت ایستگاه فضایی درگیر نیست: حرکت در خاک ها. پس از اتصال ماژول، فضانورد از این ربات سرویس رسان به منظور فشردن خاک ماه در مقابل ماژول به جهت تامین پایه ای برای آن، استفاده می کند. چنین محرک های زمینی (یا ماهی) در ساخت پایگاه های قمری بسیار مهم می باشند.

ESA همچنین ربات هایی را برای خدمت رسانی کلی در فضا طراحی کرده است. در این طرح ها با ربات سرویس رسانی که به فضانورد در بارگیری محموله ها و یا نصب باتری های واحدهای کاوشگر کمک می کند نیز روبه رو هستیم.
می توانید ویدئوی ارائه شده توسط آژانس فضایی اروپا را با نمایشی از ربات های مذکور در زیر مشاهده نمایید.
مرکز توسعه و آموزش رباتیک و مجری طرح تحول رباتیک دانش آموزی
طبقه بندی موضوعی
-
واحد آموزش
(۸۹)-
مدرسین
(۲۰) -
آموزش ویژه دانش آموزان
(۲۸) -
مقالات
(۱۲) -
کتاب
(۲) -
مطالب روز رباتیک
(۴۱)
-
-
روابط عمومی
(۲۴) -
مسابقات
(۸) -
گالری تصاویر
(۱) -
نرم افزار
(۵)
کلمات کلیدی
گروه رباتیک مبتکران جوان
مسابقات رباتیک
رباتیک رشت
موسسه رباتیک رشت
مسابقات رباتیک گیلان
آموزش رباتیک رشت
ربات های انسان نما
رباتیک
ربات پرنده
کلاس رباتیک
مسابقات رباتیک دانش آموزی استان گیلان
رباتیک دانش آموزی استان گیلان
آموزش ساخت کوادکوپتر
ربات کوچک
رباتیک در رشت
عجیب ترین ربات های جهان
ربات اسباب بازی
تازه های رباتیک
ربات های آموزشی
رباتیک کانون
گروه رباتیک مبتکران رشت
ساخت ربات در رشت
کتابهای رباتیک
دانلود کدویژن جدید
نرم افزار شبیه ساز الگودو
شبیه سازی ربات های جنگجو
ربات های جنگجو
کتاب رباتهای پرنده مولتیکوپتر
کتاب ربات مولتیکوپتر
مولتیکوپتر
بایگانی
- فروردين ۱۳۹۵(۱۴)
- اسفند ۱۳۹۴(۱)
- بهمن ۱۳۹۴(۱)
- دی ۱۳۹۴(۱)
- آذر ۱۳۹۴(۱)
- آبان ۱۳۹۴(۴)
- خرداد ۱۳۹۴(۶)
- ارديبهشت ۱۳۹۴(۲)
- فروردين ۱۳۹۴(۲)
- اسفند ۱۳۹۳(۵)
- دی ۱۳۹۳(۴)
- آذر ۱۳۹۳(۱)
- مهر ۱۳۹۳(۱)
- تیر ۱۳۹۳(۱)
- خرداد ۱۳۹۳(۷)
- ارديبهشت ۱۳۹۳(۵)
- فروردين ۱۳۹۳(۱)
- اسفند ۱۳۹۲(۱۰)
- بهمن ۱۳۹۲(۱۳)
- دی ۱۳۹۲(۱۹)
- آذر ۱۳۹۲(۸)
- آبان ۱۳۹۲(۹)
- شهریور ۱۳۹۲(۲)
آخرین مطلب
-
۹۵/۰۱/۰۴کتابهای رباتیک
-
۹۵/۰۱/۰۴دانلود کدویژن جدید (Codevision AVR v3.12 2014)
-
۹۵/۰۱/۰۴نرم افزار شبیه ساز الگودو ( Algodoo ) - مناسب دانش آموزان
-
۹۵/۰۱/۰۴شبیه سازی ربات های جنگجو
-
۹۵/۰۱/۰۴کتاب رباتهای پرنده مولتیکوپتر
-
۹۵/۰۱/۰۴آموزش تصویری هدایت خودکار کوادروتور
-
۹۵/۰۱/۰۴دانلود Proteus 8.3 SP2 2015
-
۹۵/۰۱/۰۴نرم افزار یادگیری برنامه نویسی
- دومین دوره مسابقات رباتیک استانی سازمان بسیج دانش آموزی استان گیلان
-
۹۵/۰۱/۰۲مراحل ساخت ربات شش پا
پربیننده ترین مطالب
-
۹۴/۱۰/۰۴ساخت ماشین کنترلی با بلوتوث
-
۹۴/۰۳/۰۵آموزش ساخت ربات پرنده یا کوادکوپتر
-
۹۳/۰۱/۲۲تصاویر طراحی ربات های امدادگر ، مین یاب
-
۹۲/۱۰/۲۹موشک کاغذی موتوردار PowerUp 3.0 با گوشی هوشمند کنترل می شود
-
۹۳/۰۲/۰۲معرفی سایت های آموزش و فروش ربات های عمود پرواز
-
۹۳/۰۲/۰۲آموزش ساخت ربات های پرنده
-
۹۴/۰۳/۰۸دانلود کتاب های آموزش ساخت هواپیمای کاغذی
-
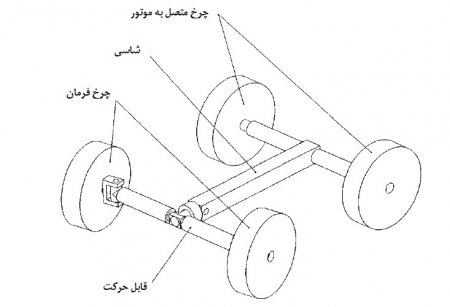
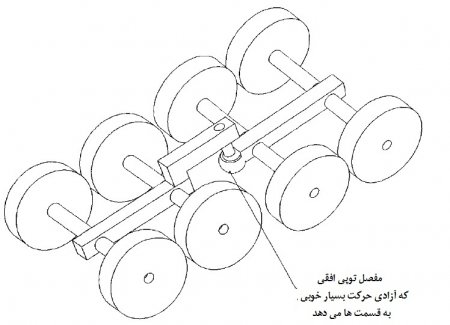
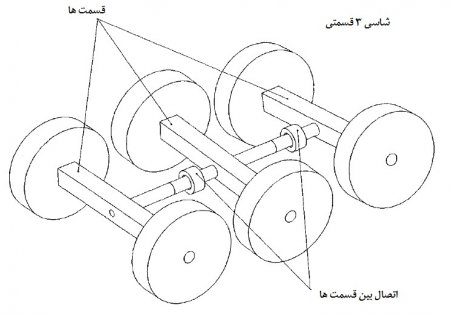
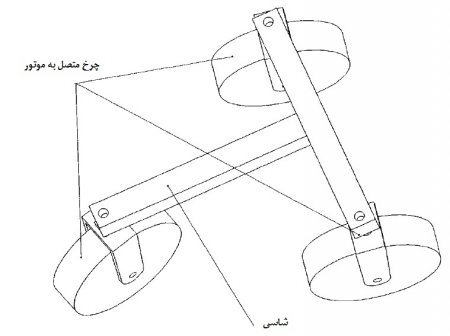
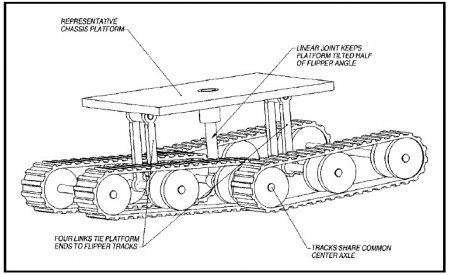
۹۴/۰۱/۲۱ربات های چرخ دار و شنی دار
-
۹۲/۱۱/۱۶کاردستی ساده با رله
-
۹۲/۱۲/۰۶نانو ربات های هوشمند در مغز و بدن انسان
مطالب پربحثتر
-
۹۴/۰۳/۰۵آموزش ساخت ربات پرنده یا کوادکوپتر
-
۹۴/۰۱/۱۵دعوت به همکاری موسسه مبتکران جوان
-
۹۴/۰۲/۲۰دعوت به همکاری در گروه رباتیک مبتکران جوان
-
۹۲/۱۰/۲۴آشنایی با برخی از مسابقات رباتیک
-
۹۴/۰۳/۰۸دانلود کتاب های آموزش ساخت هواپیمای کاغذی
-
۹۲/۱۱/۱۸مقاومت متغیّر یا ولوم
-
۹۵/۰۱/۰۴آموزش تصویری هدایت خودکار کوادروتور
-
۹۳/۰۳/۱۱لیست مراکز تابستانی کانون پرورش فکری کودکان ونوجوانان طرف قرار داد با گروه رباتیک مبتکران جوان
-
۹۳/۱۰/۰۴آموزش رباتیک مقدماتی برای دانش آموزان
-
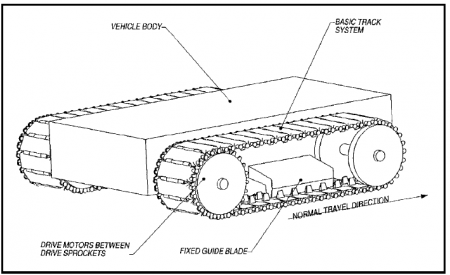
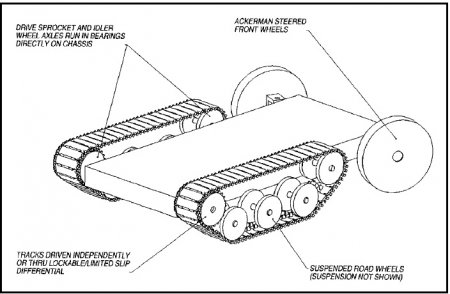
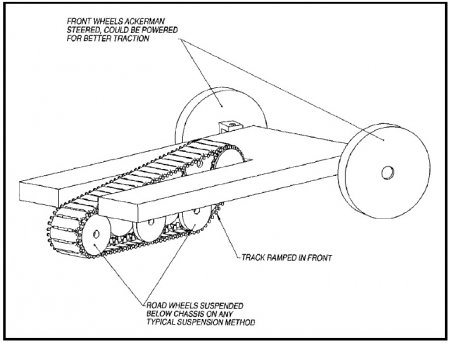
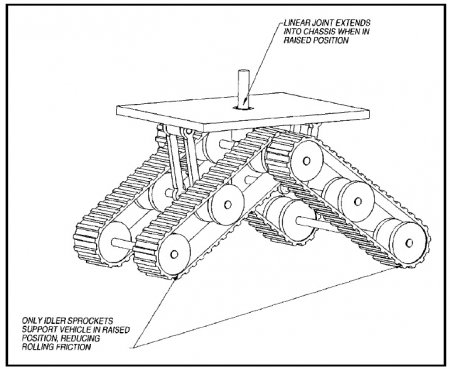
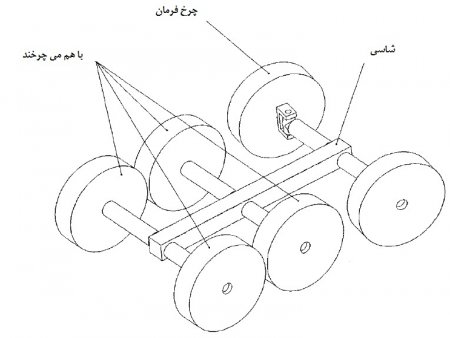
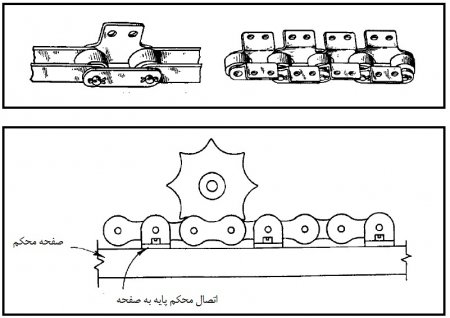
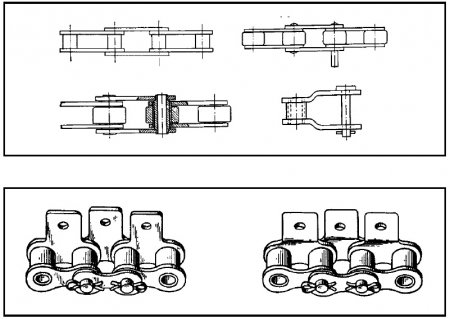
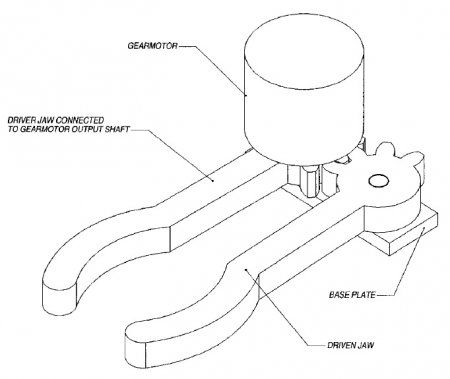
۹۴/۰۸/۱۶معرفی مکانیزم در ربات تانکی
پیوندهای روزانه
- سایت جدید موسسه مبتکران جوان
- صنایع رباتیک آراد
- باشگاه دانش پژوهان جوان
- جشنواره بین المللی فارابی
- مرکز رشد فنآوریهای پیشرفته شریف
- مسابقات سالانه بین المللی ربوکاپ آزاد ایران
- جشنواره بین المللی خوارزمی
- بنیاد ملی نخبگان
- معاونت علمی ریاست جمهوری
- مرکز رشد واحدهای واحهای فناور دانشگاه قزوین
- دانشگاه آزاد قزوین
- پارک فناوری پردیس
- پارک علم و فناوری استان گیلان
- برگزاری کلاس های آموزش رباتیک گروه در رشت
- موسسه علمی آموزشی مبتکران جوان