آشنایی با ربات های چرخ دار و شنی دار
ربات های چرخ دار ربات هایی هستند که با استفاده از چرخ های موتوردار روی زمین حرکت می کنند. این نوع طراحی از پا داشتن و راه رفتن راحت تر است، ضمنا استفاده از چرخ، طراحی، ساخت و برنامه ریزی این ربات ها را برای زمین های مسطح – ونه زمین های ناهموار – راحت تر کرده است. این ربات ها نسبت به دیگر انواع ربات بهتر قابل کنترل هستند. یکی از نقطه ضعف های این ربات ها هم این است که حرکت آنها در شرایطی که مانع وجود دارد، مثل زمین های ناهموار سنگی، شیب های تند، جاهایی ک اصطکاک کمی دارند؛ نمی توانند حرکت کنند.
ربات های چرخ دار به علت اینکه دارای فرمان دیفرانسیلی (differential steering) و درنتیجه ارزان تر و ساده تر هستند، یکی ربات های رایج در بازار مصرف می باشند. این ربات ها می توانند هرتعدادی چرخ داشته باشند ولی برای تعادل دینامیکی و استاتیکی، سه چرخ کافی است. برای تعادل بهتر می توان چرخ هایی اضافه نمود ولی مکانیزم های افزوده شده باید جوری باشند که حتی موقعی که ربات روی سطح صاف نیست، تمام چرخ ها روی زمین باشند.
ربات های تک چرخ
نگه داشتن تعادل در ربات هایی که یک چرخ دارند به علت اینکه فقط یک نقطه ی تماس با زمین دارند، کار سختی است.
ربات های متحرکی که چند چرخ دارند و از نظر استاتیکی پایدارند و قد آنها برای ارتباط با افراد بلند است، باید مرکز ثقل پایین، بدنه ی پهن و شتاب پایین داشته باشند. این شرایط منجر به بروز محدودیت هایی در کارایی آنها شده است.

لذا، ما یک نوع وارون این ربات های متحرک را بررسی نمودیم که، طول، عرض و وزن شخص به گونهای باشند که مرکز ثقل بالایی داشته باشند تا بتوانند روی یک چرک کروی تعادل خود را حفظ کنند. برخلاف آن نوع رباتهایی که دو چرخ دارند که برای حرکت در یک مسیر خاص باید اول مقداری دوران کنند و بعد به جلو بروند، این ربات هایی که یک چرخ دارند، می توانند به طور مستقیم در هر جهتی حرکت نمایند. شکل کلی طراحی این ربات ها را می توان شبیه موس (موشواره) هایی دانست که در آنها از یک گوی و دو انکودر که با این گوی تماس دارند و کار تشخیص جهت دوران این گوی را انجام می دهند، دانست. با این تفاوت که در این رباتها همان کار به صورت وارون اتفاق افتاده است. موتورهایی که به گوی متصل هستند و سیستم کنترلی باعث پدیدار شدن تعادل دینامیکی، حفظ موقعیت و حرکت از نقطه ای به نقطه ای دیگر می شوند.
یک مشکل مهم و متداول که بسیار در این رباتها دیده شده این است که در حالتی که یک ربات متحرک چرخ دار از نظر استاتیکی پایدار است، این پایداری آن به راحتی تبدیل به یک ناپایداری دینامیکی می شود؛ اگر:
- مرکز ثقل بسیار بلند باشد
- یا شتاب تند شونده یا کند شونده بسیار سریع اتفاق بیفتد
- یا ربات در سراشیبی تند قرار بگیرد
از سویی ارتفاع ربات باید آنچنان باشد که بتواند با انسانی که روی آن قرار میگیرد همخوانی و تعامل داشته باشد و سوی دیگر باید آنقدر لاغر باشد که بتواند به راحتی و بدون برخود با افراد یا اشیاء در میان مردم حرکت کند.
ربات های دو چرخ
مشابه ربات های تک چرخ، متعادل نگاه داشتن ربات های دوچرخ نیز نسبت به دیگر انواع ربات مشکل است، چراکه باید در جهت رو به جلو به حرکت خود ادامه دهد. مرکز جرم این ربات ها باید پاین تر از حور چرخ ها باشد. معمولاً برای این کار باتری های ربات را در این قسمت جاسازی می کنند.

چرخ های این ربات ها ممکن است با یکدیگر موازی باشند که در این حالت به آنها Dicycle گفته می شود؛ یا اینکه یکی در جلوی دیگری به صورت متوالی قرار بگیرد.
ربات های دوچرخ برای سرپا ماندن باید در در حال حرکت باشند، برای این کار هم باید در یک مسیر حرکت کنند. برای متعادل ماندن، بدنه ی این ربات باید زیر مرکز جرمش قرار بگیرد. برای چنین رباتی که یک چرخ در سمت راست و یک چرخ در سمت چپ دارد، حداقل دو حسگر (Sensor) لازم است. یک حسگر شیب، برای تشخیص زاویه ی شیب مسیر و انکودرهایی برای چرخ ها برای تبیین جابجایی ربات.
ربات های سه چرخ
ربات های سه چرخ را می توان به دو دسته ی کلی تقسیم نمود:
- ربات هایی که دوچرخ اصلی برای ایجاد حرکت و انتقال قدرت، و یک چرخ هرزگرد برای حفظ تعادل دارند.
- ربات هایی که چرخ سوم آنها هرزگرد نبوده و آن نیز در جهت گیری و حرکت ربات موثر است. (شبیه خودرو)
در مورد اول، هریک از چرخ های اصلی به طور مجزا حرکت می کنند و اگر هردو همجهت بچرخند، ربات به طور مستقیم حرکت می کند ولی اگر خلاف جهت هم بچرخند ربات نیز می پیچد. نقطه ی دوران ربات در حالتی که چرخ ها در جهات مختلف دوران می کنند، با توجه به تفاوت سرعت دوران آنها، قابل تغییر است.

مرکز ثقل در این ربات ها درون یک مثلث قرار دارد که گوشه های این مثلث چرخ های ربات هستند. اگر جرم بیش از حد سنگینی روی چرخ هرزگرد قرار بگیرد، ربات واژگون خواهد شد.
ربات های چهار چرخ
این ربات ها نیز حالات مختلفی دارند:
- ربات هایی که دو چرخ آنها به موتور وصل است و دو چرخ هرزگرد دارند.
- ربات هایی که شبیه تانک، چرخ های آنها دو به دو به هم متصل هستند.
- ربات هایی که شبیه خودرو، دارای فرمان هستند.

حالت اول، شبیه ربات های سه چرخ است که یک چرخ هرزگرد داشتند، با این تفاوت که ربات های چهار چرخ به علت وجود دو چرخ هرزگرد، تعادل ربات بیشتر است. علت این تعادل بیشتر هم این است که نقطه ی ثقل درون یک مستطیل قرار دارد که گوشه های آن چرخ های ربات هستند؛ که این باعث ایجاد فضای مفید بیشتری می شود. یک حالتی که پیشنهاد می شود این است که تلاش شود نقطه ی ثقل ربات در وسط مستطیل قرار بگیرد تا موقع دور زدن در پیچ های تند و همچنین در سطوح ناهموار تعادل ربات بیشتر حفظ شود.
در حالت دوم، ربات از دو جفت چرخ متصل به موتور استفاده می کند. هرجفت –که با یک خط به هم متصل هستند- در جهت یکسان دوران می کنند. نکته ی مهم در این ربات ها این است که چرخ ها در هرجفت باید با سرعت یکسان بچرخند. اگر اینطور نشود، آنی که سرعتش کمتر است، هرز و ناکارآمد خواهد بود. اگر ۲ جفت، با سرعت یکسان نچرخند، ربات به مسیر مستقیم نخواهد رفت. طراحی خوب، ترکیب با مکانیزمی شبیه فرمان خودرو است.
در حالت سوم، ربات شبیه یک خودرو می چرخد. وقتی که ربات شما با یک موتور احتراقی کار می کند، این سیستم نسبت به موارد فوق یک مزیت دارد و آن هم اینکه فقط یک موتور برای حرکت لازم است. (البته یک سرو موتور هم برای فرمان) موارد قبلی، دوموتور نیاز داشتند و یا اینکه یک موتور با یک جعبه دنده ی پیشرفته تا بتواند دو خروجی مستقل از نظر سرعت و جهت دوران ایجاد کند.
ربات های چند چرخه
وقتی که چرخ های ربات زیاد شود، به همان نسبت طراحی آن هم پیچیده می شود چرا که برای حرکت مستقیم باید تمامی چرخ ها با سرعت یکسان بچرخند. تفوت سرعت در ربات هایی با فرمان دیفرانسیلی، باعث می شود ربات از مسیر مستقیم منحرف شود. تفاوت سرعت در بین چرخ های یک طرف ربات باعث می شود چرخی که سرعتش کمتر است ناکارآمد شود.

گاهی چرخ های هرزگردی اضافه می شود که حرکت ربات را با دقت بیشتری اندازهگیری می کنند. افزودن این چرخ ها روی برخی که به موتور وصل است، مانع ایجاد لغزش و حرکات دیگر می شود که این موجب بروز خطا است. مریخ پیماها ربات های (Sojourner, Spirit, Opportunity) شش چرخ هستند که بعد از پرتاپ روی سطح مریخ حرکت کردند. این ربات ها برای بکار برده شده اند. از این ربات ها برای آزمایش خاک، مشاهده ی سطح مریخ و دیدن چیزهای جالب در آنجا استفاده می شود. سیستم تعلیق این ربات ها به گونه ای است که همزمان شش چرخ آنها با سطح در تماس است و ربات می تواند روی سطوح شیب دار یا شنی، حرکت کند.
ربات های شنی دار
وسیله ی نقلیه ی شنی دار (یا زنجیر دار) به وسیله ای گفته می شود که بجای چرخ از یک شنیِ یک تکه استفاده می کند.
این وسایل شامل ماشین های عمرانی و ساختمان سازی، خودروهای زرهی نظامی و وسایل نقلیه ی بی سرنشین می شود.
مزیت اصلی این مکانیزم نسبت به چرخ، این است که سطح تماس آن با زمین بیشتر است. لذا نسبت نیرویی که به واحد سطح وارد می شود، در این سیستم کمتر است. بنابراین می توان از این مکانیزم برای سطوح نرم و سطوحی با انعطاف کم مثل گِل، یخ و برف استفاده نمود. اصلی ترین عیوب این سیستم عبارت است از اینکه نسبت به چرخ، بسیار پیچیده تر است و از نظر مشکلاتی چون دَر رفتن یا چسبیدن بسیار مستعد است.

شنی های یک تکه، که به آنها شنی تانک یا کاترپیلار هم گفته می شود، سیستم هایی هستند که در آنها نیروی محرکه با آج های زیاد و متوالی و به هم چسبیده که با دو چرخ حرکت می کنند، منجر به جابجایی وسیله ی نقلیه می شود. معمولاً جنس این آج ها برای وسایل نظامی فولاد، و برای مواردی مثل وسایل کشاورزی یا ساختمانی ترکیب فولاد و لاستیک است. سطح زیاد این شنی ها در مقایسه با چرخ های لاستیکی یا فولادی، باعث شده است جرم وسیله ی نقلیه بهتر روی زمین توزیع شود. لذا احتمال گیرکردن یا غرق شدن در سطوح نرم کمتر شده است.
آج های برجسته ی فلزی مخصوصاً در مقایسه با چرخ های لاستیکی، هم یک پوشش خوب است، و هم یک چیز مقاوم در برابر خرابی تلقی می شود. این آج های زمخت اصطکاک خوبی را برای عبور از سطوح نرم ایجاد می کنند ولی در عین حال می توانند روی برخی سطوح مثل سطوح آسفالته، خرابی هایی را ایجاد نمایند. به برای رفع این مشکل می توان از ترکیب لاستیک و فلز برای این آج ها استفاده نمود.
این سیستم شنی، از سال ۱۷۷۰ تا امروز در حال استفاده است. که به عنوان مثال می توان به مواردی چون بولدوزرها، دستگاه های خاک برداری، تانک ها و تراکتورهای اشاره نمود. البته می توان در هر وسیله ای که از استفاده از این مکانیزم سود می برند، و نیاز به فشار کمِ وارد شونده به سطح دارند این سیستم را مشاهده نمود.
منبع: ترجمه با کمی تغییرات از Robotpark.com







































































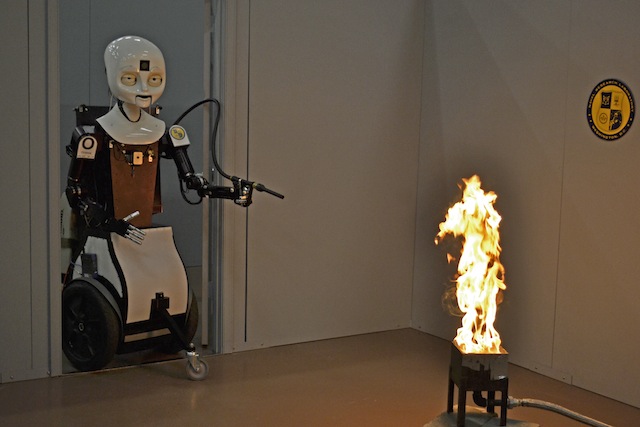 ربات آزمایشگاه تحقیقات نیروی دریایی امریکا ، یک ماشین انسان نما با شاید کمی از ویژگی های ظاهری خزندگان . اکتاویا یک ربات آتش نشان است که برای کمک به مهندسان به منظور تست تکنولوژی های جدید طراحی شده است تا دستیار نیروهای ناوگان دریایی ایالات متحده باشد .
ربات آزمایشگاه تحقیقات نیروی دریایی امریکا ، یک ماشین انسان نما با شاید کمی از ویژگی های ظاهری خزندگان . اکتاویا یک ربات آتش نشان است که برای کمک به مهندسان به منظور تست تکنولوژی های جدید طراحی شده است تا دستیار نیروهای ناوگان دریایی ایالات متحده باشد .

 ربات
ربات 
 Snake-bot
Snake-bot